历史笔记迁移系列
Word转markdown真的好累
第一集:优化算法の笔记(上)- First Order Methods
第二集:优化算法の笔记(中) - Duality Method & Second Order Methods
第三集:优化算法の笔记(下) - ADMM & Coordinate Descent
0x00. 说在前面的话
0x00_1. Convex Optimization Programming
凸优化问题定义为下面这个形式
\[\min_{x \in D} f(x) \\ s.t. g_i(x) \le 0, i=1,2,...,m\\ Ax=b\]其中:
- $f(x)$是我们要最小化的目标函数,一般使用$x^{*} $表示最优解(Optimal Value)
- $D$表示Optimization Domain,一般这不会明显的直接给出来,但可以表示成$D=domain(f) \cap domain(g_{i})$。在$D$中,并且满足约束条件的点叫做可行点(feasible point)
- $g_{i}$表示不等式约束(inequality constraints),他是一个凸函数。如果存在一个$x_{0}$,使得$g_{i}(x_{0})=0$,那么称$g_{i}$是Active的。
- $X_{opt}$是解(solution)的集合,并且是一个凸集(convex set)。如果$X_{opt}$中只有一个元素,则称为Unique solution
- $\epsilon-suboptimal$是指一个满足$f(x) \le f^{*}+\epsilon$的可行点$x$
- 局部最优和全局最优(Locally / Global Optimal)的区别在于,一个可行点是否在一个局部的领域里能取到solution。比如,存在一个$R>0$,使得$f(x)\le f(y)$对所有满足$\parallel x-y \parallel_{2} \le R $的$y$都成立。对于全局最优来说,他的solution是在整个optimization domain上。对于凸优化来说,局部最优就是全局最优。
- 如果$f(x)$是严格凸的(即对于任意$x \neq y$和$t\in(0,1)$来说,满足$f(tx+(1-t)y)<tf(x) + (1-t) f(y)$ ),那么他的solution是唯一的。假设solution不唯一,存在$x\neq y$,使得$f(x)=f(y)=f^{*}$,那么可以推出$f(tx + (1-t)y) < tf^{*} + (1-t)f^{*}=f^{*}$,即$f^{*}$不是最优解。所以solution一定是唯一的。
0x00_2. Partial Optimization
给定$f$在变量$(x, y)$上是convex的,并且$C$也是凸集,那么,$g(x)=\min_{y \in C} f(x,y)$在$x$上也是convex的。因此我们常常对一个凸问题进行局部优化以保证他的凸性(retain convexity),这也是坐标下降等算法的理论动机。即,如果下面这个原始凸问题可以对原始变量$x$进行分解(decompose)成$x=(x_{1},x_{2})$
\[\min_{x_1,x2} f(x_1,x_2)\\ s.t. g_1(x_1) \le 0, g_2(x_2) \le 0\]那么,下面这个问题也是凸的
\[\min_{x_1} \widetilde{f}(x_1)\\ s.t. g_1(x_1) \le 0, \widetilde{f}(x_1)=min\{f(x_1,x_2): g_2(x_2) \le 0\}\]0x00_3. Formation
凸优化是优化问题中的一大类,下图给出了各种子问题的层次结构,其中包括线性规划(LP, Linear Programming),二次规划(QP, Quadratic Programming),二阶锥规划(SOCP, Second-order Cone Programming)和半定规划(SDP, Semi-definite Programming)
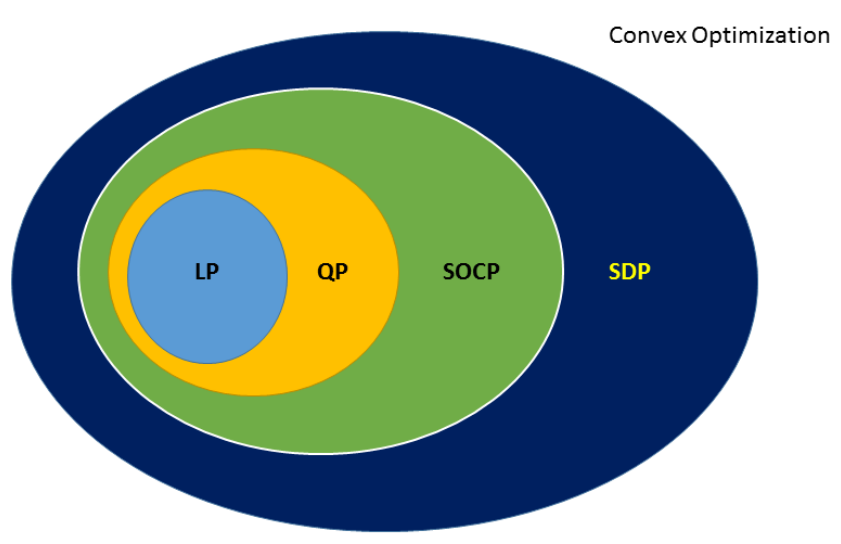
下面是各类问题的定义
| 类型 | 形式 | 说明 |
|---|---|---|
| LR | 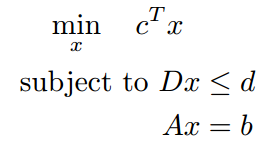 |
 |
| QP | 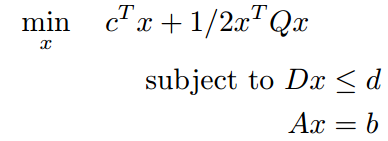 |
Q是对称半正定矩阵。也只有Q是半正定的时候,才是凸问题 |
| SDP |  |
 |
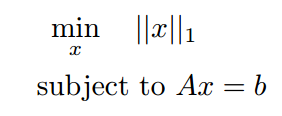
| SOCP |  |
0x01 First-order Methods
0x01_1 Gradient Descent
梯度下降,无约束优化中的常用方法,假设函数$f(x)$是可微的光滑凸函数,满足$domain(f)=R^{n}$,下式的优化目标形式成为无约束优化
\[\min f(x)\]为了求解出这个 $ x^{*} $,我们可以直接求解$\bigtriangledown f(x^{*} )=0$,但是不容易直接求解出来的。然后我们可以采用迭代的方式,找出一组$x$的序列$x^{0}, x^{1},$满足当$k \rightarrow \infty$时,$f(x^{k}) \rightarrow f(x^{*})$。梯度下降便是这样的迭代算法,给定初始$x^{0}$,该算法的$x$序列设置为
\[x^k = x^{k-1} - t_k \nabla f(x^{k-1})\]其中,$k$是迭代次数,$t_{k}>0$是每次迭代的步长,这样的更新方式可以保证每次迭代之后的函数值都有所减小,即通过泰勒展开,以下式子成立
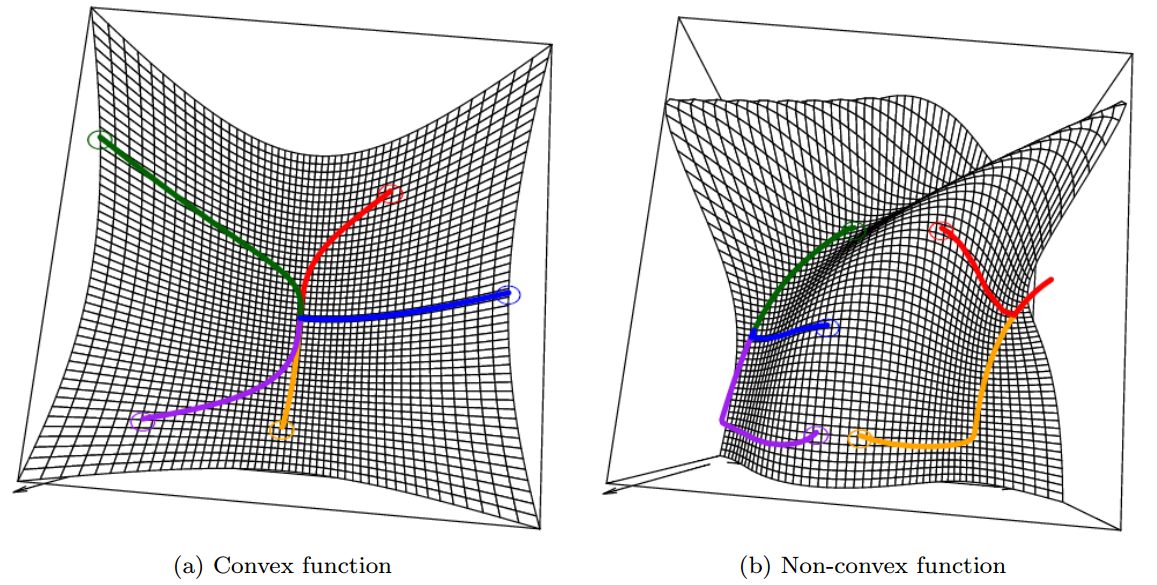
\[f(x^k) = f(x^{k-1} - t_k \nabla f(x^{k-1})) \\ \approx f(x^{k-1}) - t_k \nabla f(x^{k-1})^T f(x^{k-1}) \\ \le f(x^{k-1})\]需要注意的是,梯度下降算法可能会收敛到局部最优解,这取决于目标函数是否是convex的
下面来看看梯度下降的更新式子是怎么来的。一般来说,有两种视角。
视角1:假设函数$f$是二阶可微的,那么用泰勒公式进行展开,其中,$1\le \theta \le 1$
\[f(y)≈f(x)+∇f(x)^T (y-x)+\frac{1}{2} (y-x)^T ∇^2 f(θ(x-y)+y)(y-x)\]现在对$∇^{2} f(θ(x-y)+y)$用$\frac{1}{t}I$进行二级近似,那么得到
\[f(y)≈f(x)+∇f(x)^T (y-x)+\frac{1}{2t} \parallel y-x \parallel_2^2=g(y)\]为了使得函数值在每次迭代中降低,所以需要$y$的值,使得$∇g(y)=0$,等价于$∇f(x) +\frac{1}{t} (y-x)=0 \leftrightarrow y=x-t∇f(x)$
视角2:考虑泰勒展开$f(y) \approx f(x) + \bigtriangledown f(x)^{T}(y-x)$,记$(y-x)=ad_{k}$,$a$是给定的一个数。若$∇f(x)^{T} d_{k}<0$,这方向$d_{k}$则是我们要的使得函数值下降的方向。另外,结合Cauchy-Schwartz不等式,得到
\[\| \bigtriangledown f(x)^T d_k \| \le \| \bigtriangledown f(x)^T \| \| d_k \|\]所以当且仅当$d_{k}=-∇f(x)^{T}$时,函数值下降得最快,所以负梯度方向是最速下降方向。
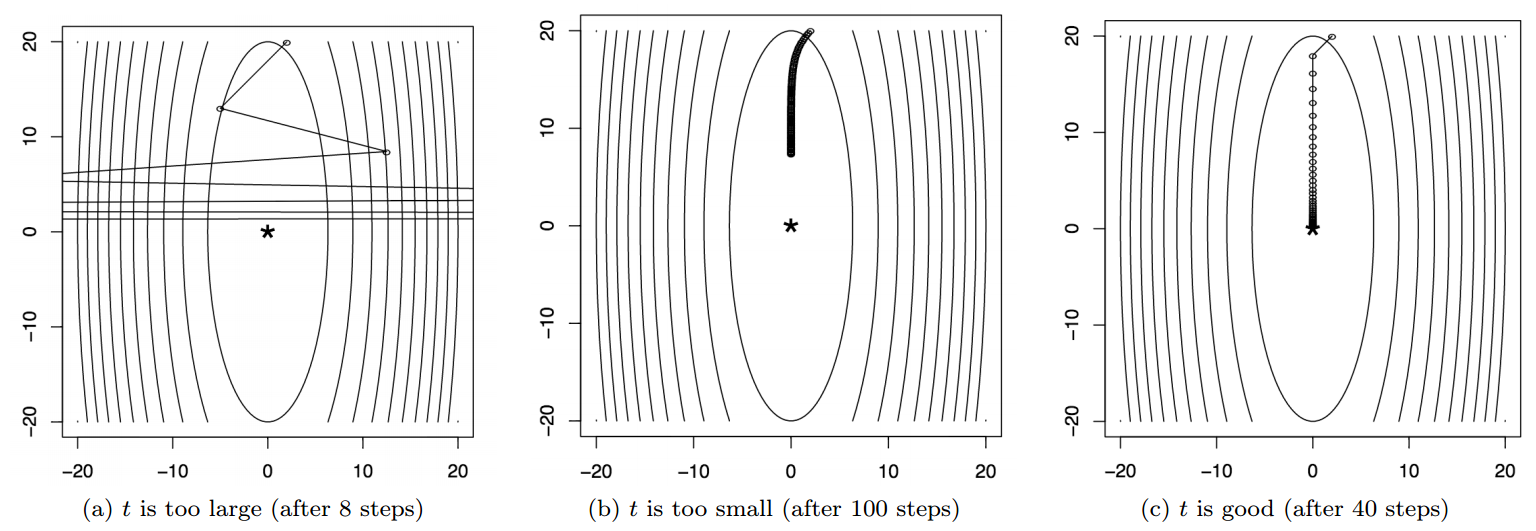
梯度下降中,我们是沿着负梯度的方向进行迭代更新,但是每次更新的步长选择也很重要。步长控制着前后两次取点的大小,如果步长太大,算法可能不会收敛,而产生很大的震荡,如果步长太小,则算法收敛的时间将变得很慢,如下图所示。所以如何选择合适的步长,在实际使用中至关重要,下面介绍两种方式:Backtracking line search和Exact line search
Exact line search:在实际编程使用中并不太常用,因为他对步长还求了一次最小,使得函数值进一步降低。但是这个步骤还不如一般的BLS的方法高效,但是他比较适用于教学与考试。Backtracking line search(BLS):旨在更新的过程中缩小步长,控制步长变得太大
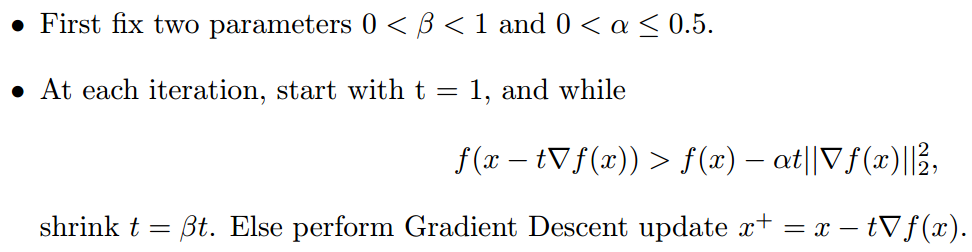
当步长t足够小的时候,他应该会满足下式
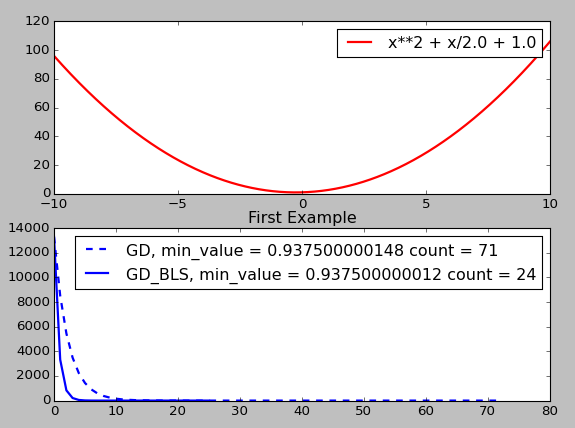
\[f(x-t∇f(x))≈(f(x)-t \parallel ∇f(x)\parallel_2^2 )<f(x)-at‖∇f(x)‖_2^2\]所以当步长太大时,BLS算法会缩短步骤,否则就选取下一个迭代点。下图是BLS对比一般梯度下降的结果图,上图原函数,下图为每次迭代后的函数值,GD采用固定步长t=0.9(这里t=1的话,不会收敛),BLS的步长初始化为t=1,两个参数$a$,$β$都设为0.5
0x01_2. Subgradient Method
梯度下降虽然简单实用,但是遇到不可微的函数,那就捉襟见肘了。事实上在这种情况下,还有次梯度Subgradient的存在。我们说一个函数$f(x)$是凸函数,则他的一阶充要条件是函数$f$可行域是凸集,并且在可行域中的任意点都满足$f(y) \ge f(x) + \bigtriangledown f^{T} (x) (y-x)$。即对于一个凸函数来说,其一阶泰勒近似实质上是原函数的一个全局下估计,subgradient的定义与这个很相似,一个凸函数$f$在点$x$处的subgradient定义为,满足以下条件的任意$g \in R^{n}$
\[f(y) \ge f(x) + \bigtriangledown g^T (y-x) , \forall y\]记$∂f(x)$表示在点$x$处,函数f的subgradient能取到的所有值的集合,值得一提的是$∂f(x)$也是闭的凸集。另外,如果函数$f$在$x$点处可微,那么这点的subgradient就是这点的gradient,否则,subgradient仍然存在,即无论什么情况,subgradient都希望达到全局下估计。另外对于不是convex的函数,subgradient也是可能存在的。下面给出几个subgradient的例子
| 原函数 | 次梯度 |
|---|---|
| $f(x)=abs(x)$ | 当$x \neq 0$,次梯度是$sign(x)$,否则取$[-1,1]$中的任意值 |
| 二范数$|x|_2$ | 当$x \neq 0$,次梯度是$\frac{x}{|x|_2}$,否则满足$|g|_2 \le 1$的任意$g$都是次梯度 |
| 一范数$|x|_1$ | 当第$i$维的梯度向量$g_{i} \neq 0$,次梯度是$sign(x_{i})$,否则满足$[-1,1]$的任意值都是该维度的次梯度值 |
| $L_{P}$范数 | $|x|_{q}$,满足$\frac{1}{p} + \frac{1}{q} = 1$ |
引入subgradient之后,我们可以吧gradient视为subgradient的一个特殊情况,那么进一步可以得到下面的优化条件(subgradient optimality condition),即如果$x$*是最优解,当且仅当在$x$*处的subgradient的集合包含0
\[f(x^*) = \min_{x} f(x) \leftrightarrow 0 \in \partial f(x^*)\] 此时,对任意的$y$,都有$f(y) \ge f(x*) + 0^{T}(y-x)$成立。并且,对于有约束的优化问题来说,上面的优化条件也同样成立。那么,是否能用subgradient代替gradient descent中的gradient,就可以得到subgradient methods呢?可以,但是这两者之间还是有区别,因为一个凸函数在某一点的subgradient可以有很多,subgradient method的更新规则是选择任意的一个就行,即:
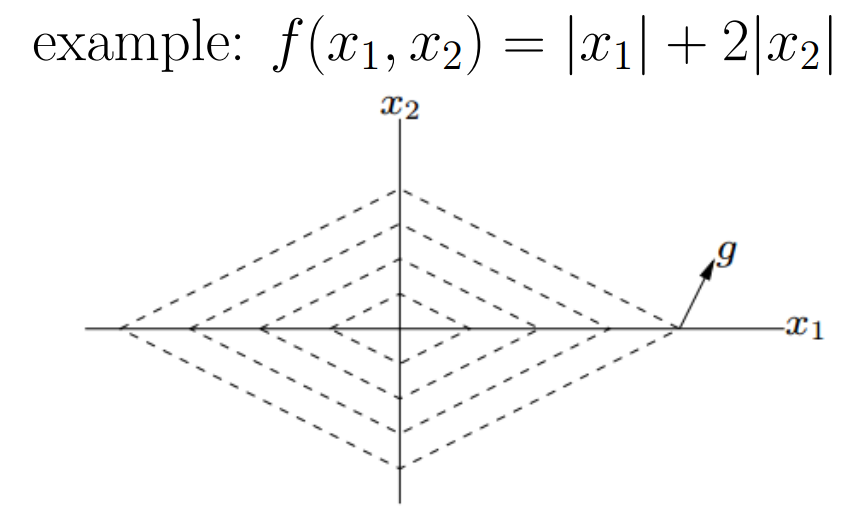
\[x^k = x^{k-1} - t_k g^{k-1}, g^{k-1} \in \partial f(x^{k-1})\] 也正因为如此,subgradient method也不一定是一个decent的方法,即negative subgradient方向可能不是一个下降方向!如下图所示:(-1,-2)是一个negative subgradient方向,但是他明显不是个下降方向
另外,和gradient descent一样,subgradient method的步长的选择也很困难,而且并没有像backtracking一样的方法存在,对于subgradient method来说大体上有两种步长选择方式:
- 固定步长t
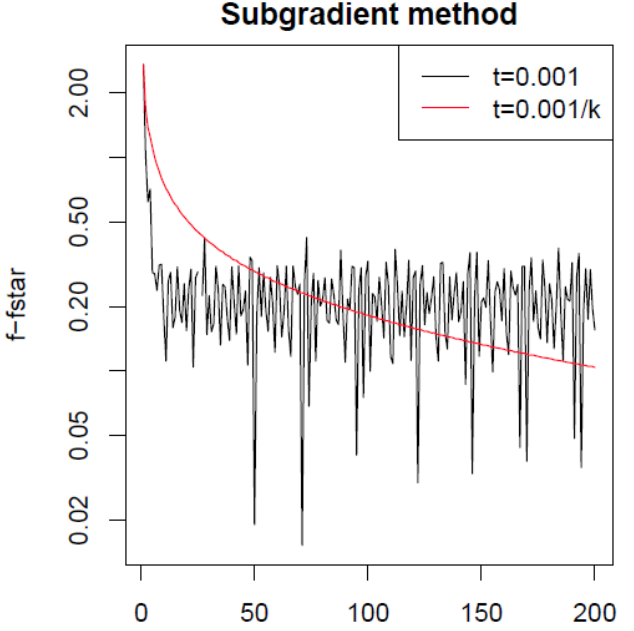
- 逐渐降低步长(diminishing step sizes),但是步长的消散不能太快,避免多次迭代后,步长变成0,即要满足下面的两个条件。一个步长选择的例子就是$t=\frac{1}{k}$
在logistic regression + lasso的条件下,通过两种选择步长的方式,可以得到下图
讲了这么多,下面给出一个用subgradient求解的例子,考虑一个Lasso优化问题
\[\min_\beta f(x) = \frac{1}{2} \| y-X\beta\|^2_2 + \lambda \|\beta\|_1, (\lambda \ge 0)\]来吧,次梯度下降,我们对$f(x)$里的$\beta$求次梯度:
\[\partial f(x) = \partial (\frac{1}{2} \| y-X\beta\|^2_2 + \lambda \|\beta\|_1) = -X^T(y-X\beta) + \lambda \partial \|\beta\|_1 = 0\\ \rightarrow X^T(y-X\beta) = \lambda \partial \|\beta\|_1 \\ \beta的次梯度:\partial \|\beta\|_1 = \left\{\begin{matrix} 1 \quad if \quad\beta_i > 0 \\ -1\quad if \quad \beta_i < 0 \\ [-1,1]\quad if \quad \beta_i = 0 \end{matrix}\right.\]综合起来就可以得到下式
\[\left\{\begin{matrix} X_i^T(y-X\beta) = \lambda sign(\beta_i) \quad if \quad \beta_i \neq 0 \\ |X_i^T(y-X\beta)| \le \lambda \quad if \quad \beta_i = 0 \end{matrix}\right.\]通过上式可以把$\beta$给解出来,现在我们把问题再简化一下,考虑$X=I$的情况,方便我们求解,此时,上面的式子简化为
\[\left\{\begin{matrix} (y-\beta) = \lambda sign(\beta_i) \quad if \quad \beta_i \neq 0 \\ |(y-\beta)| \le \lambda \quad if \quad \beta_i = 0 \end{matrix}\right.\]可以得到$\beta_{i}$的解(这个形式在凸优化中称为soft-thresholding operator $S_{\lambda} (y)$)
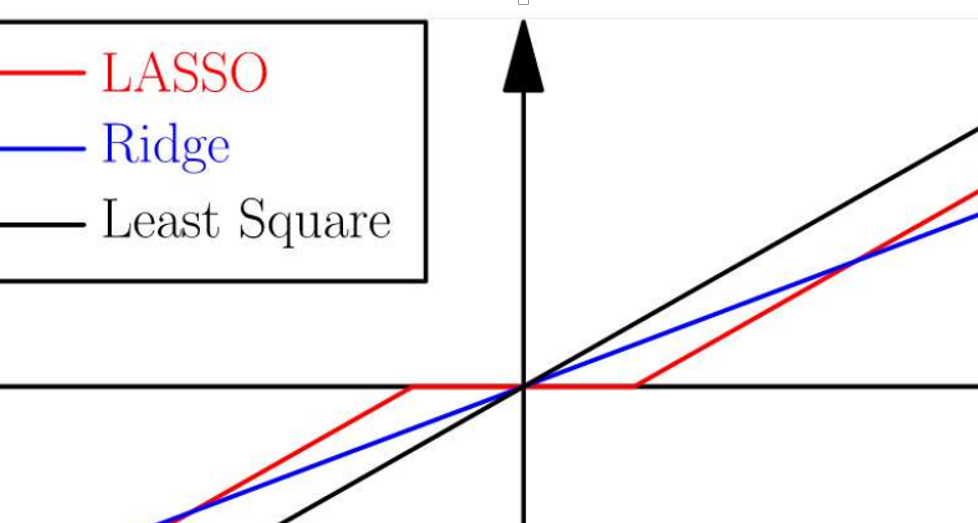
\[\beta_i = [S_{\lambda}(y)]_i = \left\{\begin{matrix} y_i - \lambda \quad if \quad y_i > \lambda \\ 0 \quad if \quad -\lambda \le y_i \le \lambda \\ y_i + \lambda \quad if \quad y_i < - \lambda \end{matrix}\right.\]这个式子就可以看出很多东西,回想在机器学习中,我们常说Lasso用来获取稀疏解,是L0范数的最优凸近似。其实Ridge和Lasso在统计学中,都是对系数做收缩的方法,可以Lasso却可以很奇妙的把系数收缩到0,从而相当于做了系数选择,得到了稀疏的解。神奇的事发生了,在我们这种问题简化的版本下,当$-\lambda \le y_{i} \le \lambda $的时候,参数$\beta_{i}$被置为了0,起到了稀疏化的功能。当然,当$X \neq 1$的时候,这个解的条件还与$X$的取值有关。由此就可以得到这一副经典的图片
0x01_3. Stochastic Subgradient Method and Batch Method
SGD & mini-batch
Stochastic method在处理加法模型的时候帮助很大,即目标函数是大量的子函数的加和的情况。这是在求机器学习的经验风险的时候经常遇到的情况,即考虑$\min \sum_{i=1}^{m} f_{i}(x)$,当m的值很大,或者说,数据量很大的时候(此时,相当于的经验风险函数中含有很多子函数),此时使用subgradient method(或者gradient descent),对应下式,m很大的话,这计算量是很恐怖的
\[x^k = x^{k-1} - t_k \sum_{i=1}^m g_i^{k-1}, \quad where \quad g_i^{k-1} \in \partial f_i(x^{k-1})\] Stochastic method的在于把上式变成下式,即在第k次迭代中,只使用一个子函数的subgradient进行更新,以经验损失的角度来看,就是每次迭代只计算一个数据的subgradient进行更新,这样做大大的加快了速度,减少计算量。
\[x^k = x^{k-1} - t_k g_{in}^{k-1}, \quad where \quad {in} \in \{1,2,...,m\}\] $g_{i}^{k-1}$的选择也有两种方式,一种是随机的从$m$中选择一个,另一种是循环依次的使用各个子函数的subgradient。当然除了Stochastic method外,还有一个在准确性,稳定性和$m$之间更折中的方法,batch method,即
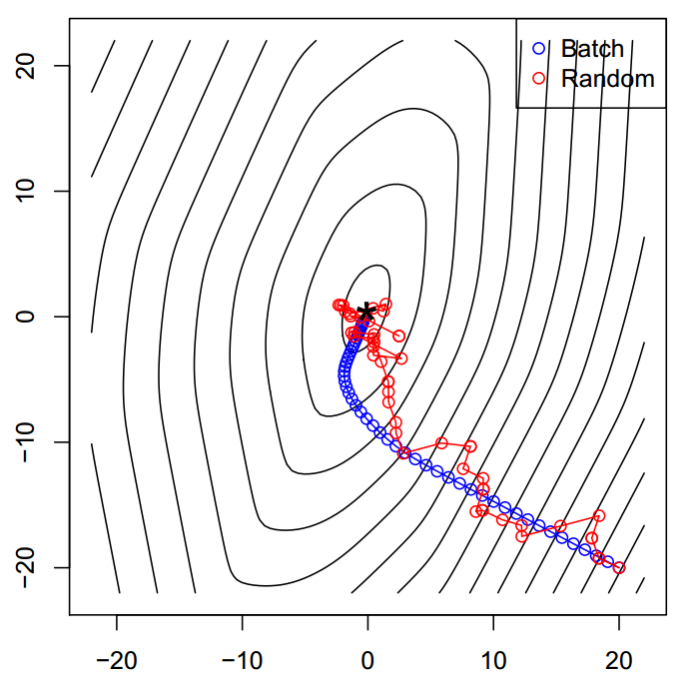
\[x^k = x^{k-1} - t_k \sum_{i=1}^{m_{batch}} g_i^{k-1}\] batch method旨在一次更新的时候,选取一部分的子函数用来更新(或者说,使用一部分数据来更新)。两者之间的区别在于$m_{batch}$次stochastic更新,近似等于一次batch更新,这里假设他们所选的更新子函数集都是相同的
\[x^{k+m_{batch}} = x^k - t \sum_{i=1}^{m_{batch}} \triangledown f_i(x^{k+i+1}) \quad m_{batch}\_time\_stochastic\_update\\ x^{k+m_{batch}} = x^k - t\sum_{i=1}^{m_{batch}} \triangledown f_i(x^k) - t\sum_{i=1}^{m_{batch}} (\triangledown f_i(x^{k+i+1}) - \triangledown f_i(x^k))\]这里有张两者之间的效果对比图,可以感受一下。另外,SGD要想train得好,也有一些经验方法可以参考
- Shuffling :旨在打乱做SGD时候的样本顺序,一般每一轮之后打乱一次。取得更好的收敛性,也有助于避免local minimal
- Batch Norm:一般采用零平均值和单位方差的方法来归一化参数,可以加快收敛
- Early stopping:分出一个验证集,每过一定迭代轮数就看下验证集上的error是否有变化,如果没有变化或者出现上升则停止迭代
- Gradient Noise:出淤泥而不染,在更新的梯度里适当的增加noise,挺像在强化学习里的探索策略。
站在训练数据集的角度上来说,每次更新,根据选择多少数据点来训练模型,可以把算法分为普通的Gradient descent,Batch based和stochastic based。由于stochastic gradient descent收敛并不理想,现有很多的加速算法,比如Nesterov accelerated gradient,Momentum based,Adagrad,Adadelta,RMSprop,Adam,AdaMax,Nadam。这些改进的算法要么在下降方向上做文章,要么考虑了迭代步长的自适应选择
Momentum
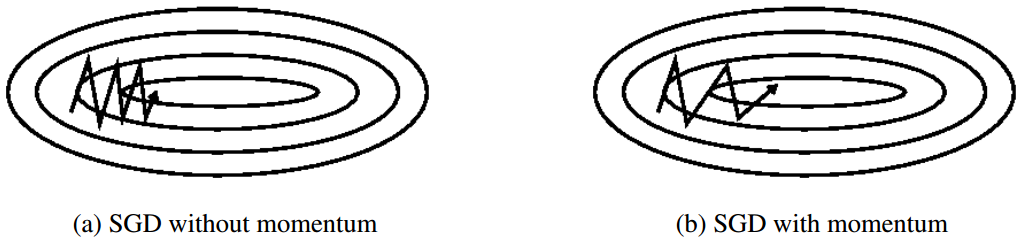
传统的梯度下降算法的下降方向由当前的梯度负方向确定,而基于动量的方式还考虑了上一轮的迭代方向。其认为当前的更新方向是 上次的更新方向与当前梯度方向的带权加和。即
\[v^k = r v^{k-1} + \mu \triangledown_\beta f(x;\beta) \\ \beta^{k} = \beta^{k-1} - v^k\]其中,$r$控制了动量项的效果(一般取值0.5/0.9/0.99)。当然更好的方式是初始化$r$为一个比较小的数,然后随着迭代次数不断的增加
Nesterov Accelerated Gradient
该方法是在momentum的基础上,先沿着上一轮的动量方向走一点,再做momentum更新。通过步骤$\beta - r v_{t-1}$,可以用来估计下一次参数的值。起到一个”look ahead”的作用。并且由下图,可以看出NAG的更新方向更靠近真实的梯度方向,使得NAG的收敛速度比动量的方式更快。(但是在随机梯度下降的框架下,并没有改进)
\[v^k = r v^{k-1} + \mu \triangledown_\beta f(x;\beta - r v_{t-1})\\ \beta^{k} = \beta^{k-1} - v^k\]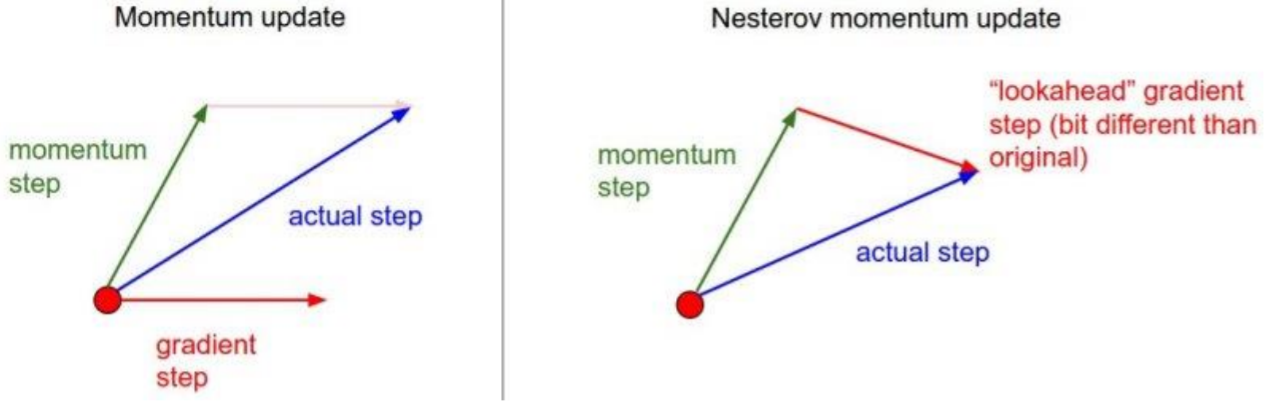
Adagrad
Adagrad能自适应选择更新步长,并且能更细腻的,对于参数的不同维度上有不同的步长选择,能很好的处理sparse data,保证数据充足的维度步长更小(有足够的数据来学习,就不要担心学不好,慢慢来学就行),对于难于学习的维度,有更大的步长(数据吃不饱,就不放过任何一次机会,aggressive的学呗)。对于第i维参数,他的更新式子为:
\[\beta_{t+1,i} = \beta_{t,i} - \frac{\mu}{\sqrt{G_{t,ii} + \epsilon}} g_{t,i}\]其中$g_{t,i}$是当前梯度的第i维,$G_{t,ii}$是对角矩阵G的第i-i元素,代表从开始到第t时刻的,$\beta_{i}$的梯度的平方和,而$\epsilon$是一个防止除零的小整数(1e-8)。$\mu$一般取值0.01。然而随着迭代的进行,$G_{t,ii}$会变得越来越大,使得步长缩减太快,后面几乎学不到什么东西。
Adadelta
Adadelta是Adagrad的扩展,他通过维护一个窗口,限制$G_{t,ii}$为前$k$个梯度的平方和,削减步长衰减。但是在具体实现中没有直接只保存前$k$个梯度,而是采用了权重衰减的策略,为每一个梯度值都赋予一个加权和的权值。该算法会维护一个梯度的running average $E[g^{2}]_{t}$:(把式子展开就是每一项$g_{t}^{2}$的加权和)
\[E[g^{2}]_{t} = \gamma E[g^{2}]_{t-1} + (1-\gamma) g_t^2\]Adam
Adam是自适应的动量算法,和Adadelta很像,也是一个在步长上做文章的算法。Adam保留了梯度的一阶矩和二阶矩信息,并且同样对这些信息做指数衰减,即
\[m_k = \lambda_1 m_{k-1} + (1-\lambda_1) g_k \\ v_k = \lambda_2 v_{k-1} + (1-\lambda_2) g_k^2 \\\]由此可以得到类似于Adadelta的更新方式
\[\beta_{t+1} = \beta_{t} - \frac{\mu}{\sqrt{\widehat{v_t}} + \epsilon} \widehat{m_t}\\ \widehat{v_t} = \frac{v_t}{1-\lambda_2^t} \\ \widehat{m_t} = \frac{m_t}{1-\lambda_1^t} \\\]式子里没之间用m和v,这样做的目的在去除m和v的bias(don’t know why),相当于是一个修正项。常用取值$\lambda_{2}=0.999$,$\lambda_{1}=0.9$,$\mu=0.002$
AdaMax
AdaMax是Adam是扩展版本,在adam中,$v_{t}$是集合了历史梯度的L2范数的信息,AdaMax是打算扩展到Lp范数上,尤其是${L_{\infty}}$范数的时候
0x01_4. Proximal Gradient Method
对于不可微的凸函数f,前面我们介绍的subgradient method,从收敛性的角度来说是不可观的。假设,我们想要误差精度$\epsilon=0.001$,即$f(x^{k})-f* \le \epsilon$,梯度下降要迭代$O(1000)$次,subgradient method却要用1百万迭代(关于各个算法的收敛性,将在后面章节汇总给出)!那么需要如何加速收敛呢?
现在考虑函数$f$,可以分解成两个函数的和$f(x)=g(x)+h(x)$,其中$g(x)$是可微的凸函数,$dom(g)=R^{n}$,$h(x)$是形式简单,不一定可微的凸函数。对于这样的函数$f$,可以采用proximal gradient descent的方法,保证$O(\frac{1}{\epsilon})$的收敛率。现在来看看,这个函数是怎么分解的。
我们令$f(x^{+})=g(x^{+})+h(x^{+})$,回忆Gradient descent的第一种推导,我们对函数进行一次泰勒展开,并用$\frac{1}{t}I$二次近似$\triangledown^{2}f(x)$,得到的函数的最小值就是下一步的$x^{+}$,即
\[x^+=arg\min_z f(x) + \triangledown f(x)^T(z-x) + \frac{1}{2t}\|z-x\|^2_2\]既然$g$是可微的,则对$g$同样做的动作
\[x^+=arg\min_z g(x) + \triangledown g(x)^T(z-x) + \frac{1}{2t}\|z-x\|^2_2 + h(z)\]由于,上式右边是关于$z$的函数,所以等价于
\[x^+=arg\min_z \frac{(t \triangledown g(x))^2}{2t} + \triangledown g(x)^T(z-x) + \frac{1}{2t}\|z-x\|^2_2 + h(z) \quad 第一项是为了配平方\\ = \frac{1}{2t} \| (z-x) + t \triangledown g(x) \|^2_2 + h(z)\\ = \frac{1}{2t} \| z - (x - t \triangledown g(x)) \|^2_2 \\ = Prox_{h,t} (x - t\triangledown g(x))\]其中,定义proximal mapping为关于$h$和$t$的函数,即
\[Prox_{h,t}(x) = arg\min_z \frac{1}{2t} \| z-x \|^2_2 + h(z)\] 可以看出$Prox_{h,t} (x)$是与$g(x)$无关的,只有$h(x)$有关,所以,计算$Prox_{h,t} (x)$的复杂度很大程度上依赖$h(x)$。而$Prox_{h,t} (x-t \triangledown g(x))$从形式上看,这个式子的最优解$z$使得第一项逼近$g$的梯度下降值,并且需要也使得第二项变小。现在,我们就可以来说说proximal gradient descent咯。给定初始点$x^{0}$,第$k$次的迭代点为
\[x^k= Prox_{h,t_k} (x^{k-1} - t_k \triangledown g(x^{k-1}))\] 我们在引入一个例子,之前在subgradient method中提到过解Lasso的问题,现在再把这个问题转化成proximal的形式再感受感受。我们的目的是求解$\beta$
\[\min_\beta f(x) = \frac{1}{2} \| y-X\beta\|^2_2 + \lambda \|\beta\|_1, (\lambda \ge 0)\]这里的函数就自带分解成了两个部分,那就可以带公式了
\[Prox_{h,t}(\beta) = arg\min_z \frac{1}{2t} \|z-\beta\|_2^2 + \lambda \|\beta\|_{1} \\ \leftrightarrow arg\min_z \frac{1}{2} \|z-\beta\|_2^2 + t \lambda \|\beta\|_{1} \\ = S_{\lambda t}(\beta) \quad 记上式为这符号\] 神奇的事发生了,还记得在subgradient那部分解Lasso问题的最后,我们把$X=I$,然后得到的解是Soft-thresholding operator $S_{\lambda} (y)$,只不过由$\lambda$变成了$\lambda t$,也就是说对于Lasso问题,proximal mapping的解就是Soft-thresholding operator $S_{\lambda t} (\beta)$。既然我们已经得到了解,那么接下来就可以直接求解下一步的迭代值为下式。过程上来说,是先对$g$函数走一步梯度下降,然后进行Soft-thresholding operation。
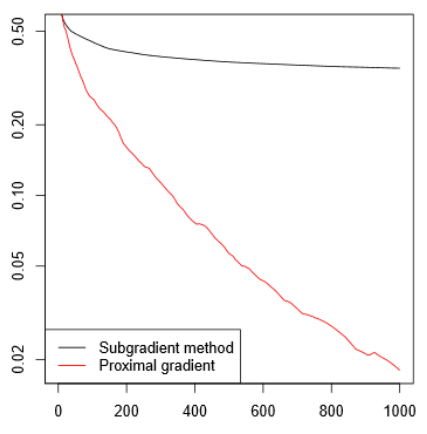
\[\beta^+ = Prox_{h,t}(x-t\triangledown g(\beta)) = S_{\lambda t}(\beta + tX^T(y-X\beta))\] 这个求解方法,就是解Lasso的著名算法Iterative soft-thresolding algorithm (ISTA),这个算法很牛逼,与之前用subgradient method的方法解Lasso相比,收敛快了很多,如下图
另外Backtracking Line Search也是同样适用于proximal method的!不过不在$f$上直接做文章,而换成$g$。也就是说当满足下式的时候,进行步长收缩,否则更新$x^{k+1}$:
\[g(x-t G_t(x)) > g(x) - t\triangledown g(x)^T G_t(x) + \frac{t}{2} \|G_t(x)\|^2_2\\ where \quad G_t(x) = \frac{x - Prox_{h,t}(x-t\triangledown g(x))}{t}\]下面我们来看一些例子:
- 当$h(x) = 0$时,proximal gradient descent就是Gradient Descent
- 当$g(x)=0$时,proximal gradient descent就是proximal minimization algorithm
- 当h(x) 是indicator function,那proximal gradient descent就是Projected Gradient Descent
projected gradient descent
indicator function是指在定义域中取值为0,否则为无穷,用于限制一定的可行域的函数
\[\min_{x\in R^n} g(x) + I_C(x) \leftrightarrow \min_{x\in C} g(x) \\ where \quad I_C(x) = \left\{\begin{matrix} 0 \quad if \quad x \in C \\ \infty \quad otherwise \end{matrix}\right.\]这个时候我们可以写出Prox函数
\[Prox_t(x) = arg\min_{z \in R^n} \frac{1}{2t} \|x-z \|^2_2 + I_C(z) \\ =arg\min_{z \in C} \frac{1}{2t} \|x-z \|^2_2\] 所以更新公式变成了下式,这里的$P_{C}(x)$是distance to a convex set的问题,最优值就是x在C上的投影,所以算法称为projected gradient。即先不管可行域,正常走梯度下降,然后将梯度下降后的值再映射到可行域边界上。
\[x^+ = P_C(x-t\triangledown g(x))\]proximal minimization algorithm
当$g(x)=0$的时候,问题转化为,$\min h(x)$
\(x^+ = Prox_t(x) = arg\min_z \frac{1}{2t} \|x-z\|^2_2 + h(z)\) 这个问题,除非我们知道$h(z)$和$Prox_{t} (x)$的close-form,不然是无法编程实现的。总的来说,基于proximal gradient的方法有一个弊端,就是$Prox_{t} (x)$的计算问题,有可能会很难解
0x01_5. Accelerated Proximal Gradient Method
该方法来自Beck and Teboulle (2008)的工作,是对Nesterov工作的扩展,旨在达到一个更好的收敛率($o(\frac{1}{\sqrt{\epsilon}})$),给定凸函数g(x)是可微的, h(x)是凸函数,优化目标和之前一样,假设了函数$f(x)$可以分解成两部分$g(x)+h(x)$。这个算法的迭代式子如下所示,感觉像是在Proximal Gradient Descent的基础上,加上了动量的方法。
\[v=x^{k-1} + \frac{k-1}{k+1} (x^{k-1} -x^{k-2} ) \\ x^{k} = Prox_{t_k} (v - t_k \triangledown g(v))\]为啥会是这样更新呢?略,因为我也没看论文。下面是一些汇总知识点
- 当$k=1$的时候,$v=x^0$,相当于执行普通的Proximal Gradient
- 当$k \ge 2$时,$v$相当于在$x^{k-1}$的基础上,增加了上一次的加速信息(迭代方向信息),在随着$k$增加,越来越趋于最值,gradient/subgradient越来越小,$\frac{k-2}{k+1}$的值增加,并趋于1,方向的加速信息的权重越大,加速向最值的方向收敛。
- $\frac{k-2}{k+1}$的形式,与算法的收敛性有关,我也不知道为啥是这个值
- 当$h(x)=0$,这个方法就是Accelerated Gradient Descent
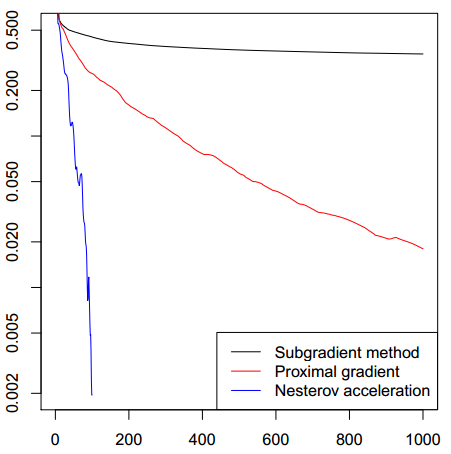
下图是对lasso问题求解的结果(也就是对应的subgradient for lasso, ISTA和FISTA算法),可以看到这个算法简直是快啊,但是他也不能保证在次梯度上的下降性哦
0x01_6. Conclusion of Convergence Analysis
前文提到了好多算法收敛率,这部分总结了一些算法的收敛性结论,方便大家参考。首先定义一个Lipschitz continuous的概念:如果一个$f$对于定义域里的任意$x$和$y$都满足下式,则称$f$是Lipschitz连续的,满足条件的最小数$G$叫做Lipschitz常数。这个式子约束了在定义域范围内的任意两个点之间的连线,其斜率一定要是有界的,所以变动$f(x)$中$x$的取值,函数值不会存在大幅度的突变。
\[\|f(x) - f(y) \| \le G \|x-y\|_2\] 另外我们还需要定义另一个概念,强凸函数(strongly convex)。给定$m>0$,如果函数$f(x)-\frac{m}{2} | x|_{2}^{2}$是凸函数,那么函数$f(x)$是强凸的。现在,假设下面结论中的凸函数$f$是可微的,并且$dom f=R^{n}$,Lipschitz常数为$L>0$。
Gradient Descent的收敛性
对于固定迭代步长$t$,并且$t \le \frac{1}{L}$,他的收敛率是$o(\frac{1}{k})$,换句话说,如果要想满足$f(x^{k}) - f^* \le \epsilon$,我们需要$o(\frac{1}{\epsilon})$次的迭代。
\[f(x^k) - f^* \le \frac{\|x^0 - x^* \|_2^2}{2tk}\]如果函数$f$是强凸的,步长$t\le \frac{2}{L+m}$,那么上面的式子可以进一步的写成
\[f(x^k) - f^* \le \frac{c^kL}{2}\|x^0 - x^* \|_2^2 \quad where \quad 0<c<1\] 可以看到,这时候变成了指数级的收敛$o(c^{k})$,这个$c$依赖于$L/m$,(这个$L/m$叫做condition number,是在数值计算中的容易程度的衡量,一个低条件数的问题称为良置的,而高条件数的问题称为病态,此时收敛率相对降低),我们需要$o(log(1/\epsilon))$次迭代。
如果采用了Backtracking Line Search的方式来做步长选择,那可以得到下式的收敛性,其中$\beta$是步长的收缩率,当$\beta=1$的时候,收敛率和固定步长一样
\[f(x^k) - f^* \le \frac{\|x^0 - x^* \|_2^2}{2k \min(1, \beta/L)}\]Subgradient Descent的收敛性
对于固定步长t,满足下式。可以看出在无限次迭代之后,最优解也是得不到的,当然小的步长$t$可以缩小与最优解之间的差异
\[\lim_{k \rightarrow \infty } f(x_{best}^k) \le f(x^*) + \frac{L^2 t}{2}\] 别的定理也指出,subgradient method如果要达到$f(x^{k} )-f^* \le \epsilon$,需要$o(\frac{1}{\epsilon ^{2}} )$次迭代.
对于diminishing step来说, 满足下式,最优解是可以得到的
\[\lim_{k \rightarrow \infty } f(x_{best}^k) = f(x^*)\]Stochastic Method的收敛性
对于固定步长t,满足下式,其中,$f=\sum_{i}^{m} f_{i}$
\[\lim_{k \rightarrow \infty } f(x_{best}^k) \le f(x^*) + \frac{5(mL)^2t}{2}\] 对于diminishing step来说, 满足下式
\[\lim_{k \rightarrow \infty } f(x_{best}^k) = f(x^*)\]Proximal Gradient Descent的收敛性
若$\triangledown g$的Lipschitz常数是L>0,则:
对于固定步长$t\le 1/L$,满足下式。即收敛率是$o(1/k)$或者$o(1/\epsilon)$
\[f(x^k) - f^* \le \frac{\|x^0 - x^* \|_2^2}{2kt}\] 如果采用了Backtracking Line Search的方式来做步长选择,那可以得到下式的收敛性,其中$\beta$是步长的收缩率
\[f(x^k) - f^* \le \frac{\|x^0 - x^* \|_2^2}{2k \min(1, \beta/L)}\]Accelerated Proximal Gradient Descent的收敛性
若$\triangledown g$的Lipschitz常数是L>0,则:
对于固定步长$t\le 1/L$,满足下式。即收敛率是$o(1/\sqrt{\epsilon})$
\[f(x^k) - f^* \le \frac{2\|x^0 - x^* \|_2^2}{t(k+1)^2}\] 如果采用了Backtracking Line Search的方式来做步长选择,那可以得到下式的收敛性,其中$\beta$是步长的收缩率
\[f(x^k) - f^* \le \frac{2\|x^0 - x^* \|_2^2}{(k+1)^2 \min(1, \beta/L)}\]0x01_7. Parallelizing & Distributed SGD
前面都讲了SGD,那自然会联想到分布式机器学习里的SGD-style的优化算法,有机会可以单独写一个博文专门讲讲分布式机器学习,这里我们先简单提一提SGD-style的优化算法。一般来说,大概分成两类:同步更新和异步更新。
HogWild!
没记错的话,这个应该是NIPS上的文章(不算真的分布式,算是多线程),它用Lock-free的方式来异步更新参数,由于是lock-free,可能出现参数更新的override,所以他适用于sparse的参数更新,不然有冲突。比如稀疏SVM,matrix completion, Graph cut
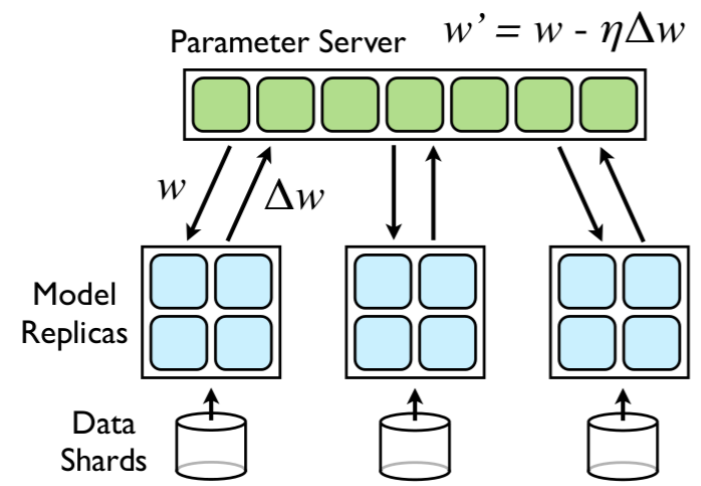
Downpour SGD
这是个基于parameter server的异步更新算法
Delay-tolerant
该算法是AdaGrad的扩展,所以能自适应的调节步长
Elastic Averaging
还是一个基于Parameter Server的可以做同步,也可以做异步更新策略。他会计算local参数和全局参数之间的差距,然后在梯度下降时,加上这个差距,使得local参数与全局参数更加相似