10. Model-based RL
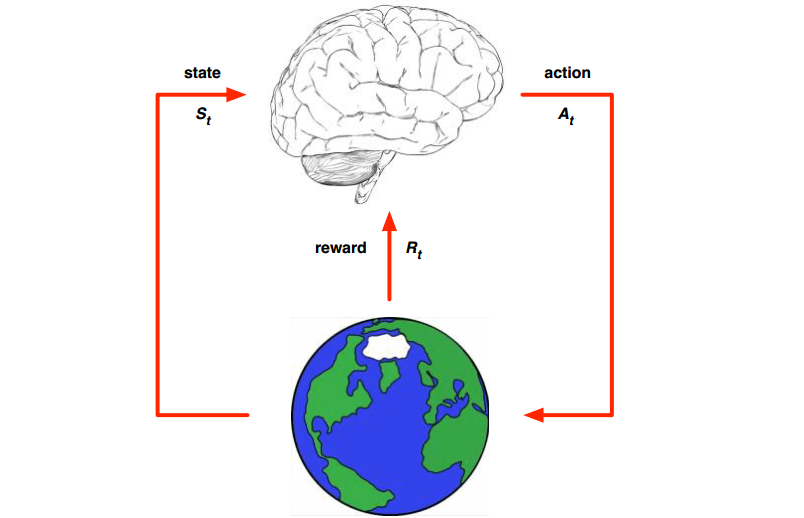
上一章说的是Model-based Planning,即结合已知的dynamics,做出更好的value function的估计和更好的决策。本章的Model-based RL 是指,dynamics未知(本文特指状态转移,好像现在对reward function都不会怎么学习?reward都是专业知识?),但是我们要去学习它!学习到之后,我们又可以做planning啦。model-based RL和model-free RL的区别就是前者是去学习dynamics,然后获得value function或者policy,后者是直接去学习value function或者policy,而不依赖dynamics。所以model-based RL可以用下面的图表示,这里的地球是一个卡通图案,表示他是我们通过样本学习到的dynamics,然后整个RL过程就在这样的已知的dynamics中进行。
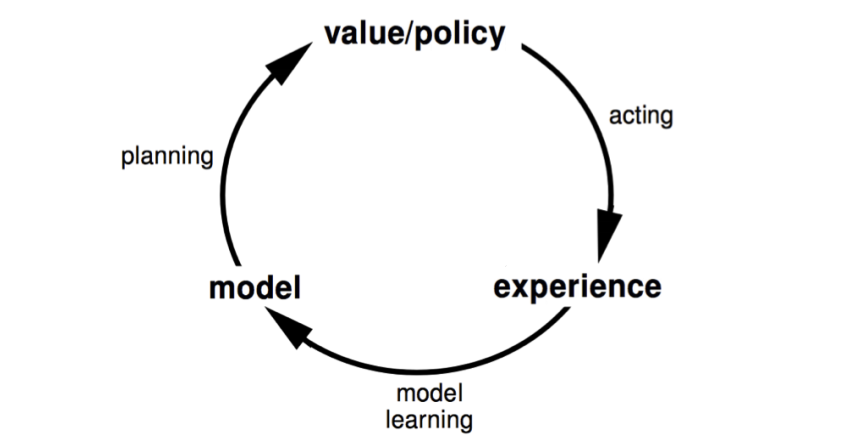
下面是一个model-based RL的流程图:一开始我们初始化一定的policy,用他和环境交互,获得经验数据;在使用这个经验数据学习出dynamics。当dynamics已知的时候,我们就可以planning出更好的policy。比如使用动态规划planning(policy iteration, value iteration, MC, TD等等),Stochastic optimization,MCTS等model-based planning的方法。但是,这种相互依赖的loop,一好则好,一旦学习有猜错,那就开始累计了。实际效果会限制于所学习的model/dynamics的好坏。因此,如果model学得太烂,完全就可以用model-free等等的方式
10.1 Planning with learned dynamics
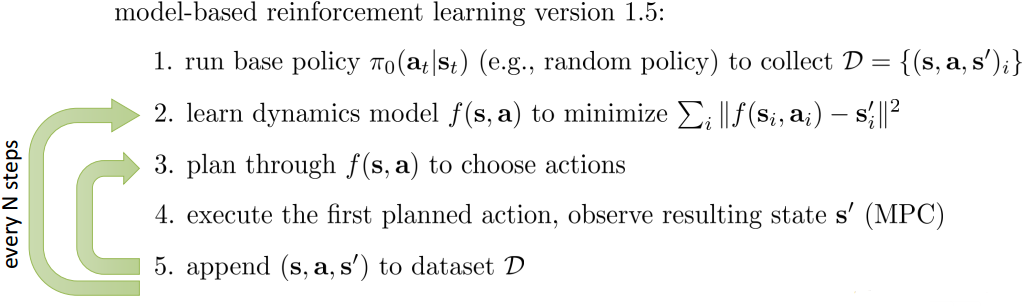
从上面的示意图,只能看出model-based RL由三个步骤组成:
- 用当前的policy/value,出招,得到一些反馈数据
- 根据反馈数据,学习出一个dynamics $f$
- 根据$f$来planning,优化policy/value
在实际操作中,会有一些其他问题:训练数据是否足够用来学习,是否能学习到一个好的模型?
10.1.1 Distribution mismatch
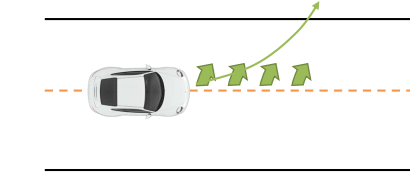
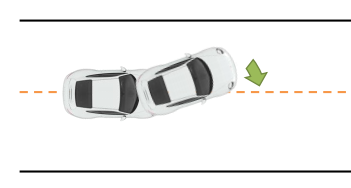
训练数据是源于真实的MDP,但是训练数据是否能很好的反应MDP,这是未知的。比如在自动驾驶问题中,如果车子一直都在左转弯绕圈,那么用这样的数据所学习的planning,不就只能左转弯了么。实际上训练数据(左转绕圈)和真实驾车场景是不一样的。如果我们用于学习dynamics的算法很厉害,拟合能力很强,那么这个问题就会更加突出,因为学到的dynamics overfits,建立在它之上的planning也就不会好。
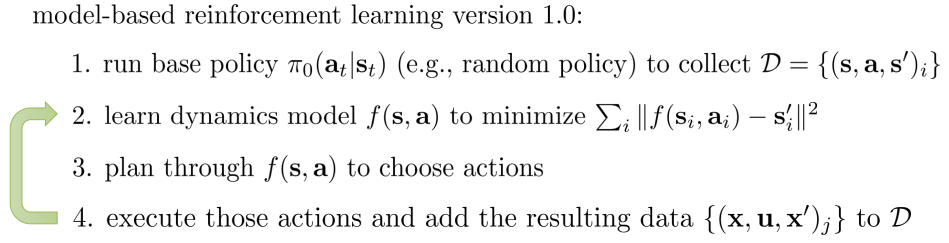
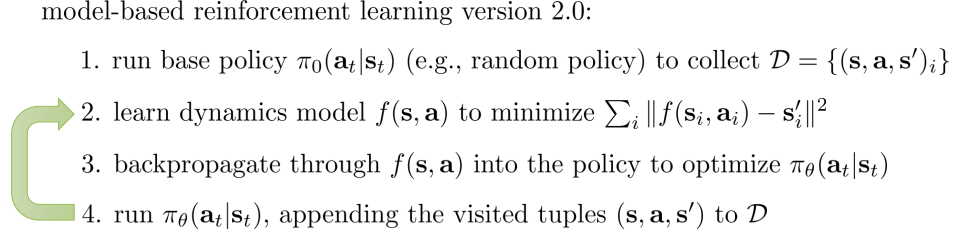
解决这个问题的一个可行方案就是扩充训练数据集,竟可能的去避免mismatch。如下所示,在第4步增加数据扩充的步骤。
这个策略和模仿学习(imitation learning)中的DAgger算法(Dataset Aggregation)很相似(伪代码如下),对于DAgger算法的dabug就是要人来打标签,选动作。而在强化学习中,则是直接使用当前policy的动作值当label,勉强人工的过程。

但是,这个扩充数据集的方法就不适用于open loop plan了,毕竟没有交互,就没机会得到新数据。
10.1.2 Model error
另一个问题就是,真实的dynamics我们是不知道的。通过学习出来的dynamics很有可能是不准确的,甚至是有大bug的。比如在自动驾驶问题中,如果dynamics学得不好,在给定状态下做的planning,也许会给出错误的答案:如果学习到的dynamics告诉你前面是个左转弯(实际上是直路),那么planning会告诉你赶紧左转,但是一旦左转,那就会冲出公路咯。
这种情况下,除了数据扩充的方法外,还可以re-planning。在一段时间之后的新状态下,进行重新planning,一旦re-planing的结果发现不能再左转了(即使学习到的dynamics告诉你应该要左转),这个时候还是有改正的机会。
下面代码的第3就是re-planning(注意,之前的代码是每N次,更新一次dynamics,然后做一次planning,这里是每N次,更新一次dynamics,但是planning是做了N次的)
但是这里re-planning带来的计算量不会太恶心,因为如果每次都在做planning的话,其实不用去plan那些时间片很久以后的事,往往plan一个短期的future就很work了,这时候就可以使用上一章提到的Stochastic optimization方法了。
10.2 Learn a model by supervised learning
为了要学习dynamics(这里特指状态转移和reward function),可以求助由于监督学习。给定训练数据${s_{t},a_{t},r_{t+1},s_{t+1}}^n$,我们要求解的是$s_{t+1}=P(S_{t+1}\mid S_{t},A_{t})$和$r_{t+1}=R(R_{t+1}\mid S_{t},A_{t})$。这时候监督学习学习的目标不在是label,而是输入$s_{t},a_{t}$,输出$s_{t+1}$和$r_{t+1}$。回想最开始我们提到的动态系统,就可以用来解他们,而且还是考虑到了数据之间的依赖情况。当然,我们也可以把这种依赖情况忽略,之间采用简单的模型去拟合:
\[s_1,a_1 \rightarrow r_2,s_2\\ s_2,a_2 \rightarrow r_3,s_3\\ ...\\ s_{T-1},a_{T-1} \rightarrow r_{T},s_{T}\\\]比如用回归问题来集合reward,用密度估计来拟合state。总的来说,可以用local和global两个大类的模型来拟合(比如下列)。global模型是指用一个模型来拟合所有的state和action的输出,local模型则是用多个局部的小模型来拟合特定状态和action下的输出。
- Table Lookup Model
- Linear Expectation model
- linear gaussian
- gaussian process
- deep belief network
- iLQR等等
10.2.1 Fitting global dynamic model
10.2.1.1 Table Lookup Model
table lookup其实就是通过简单的数据统计,记录所有相同输入下的输出均值。可以将它视作一个全空间下的KNN回归模型,这个K等于数据点的个数。
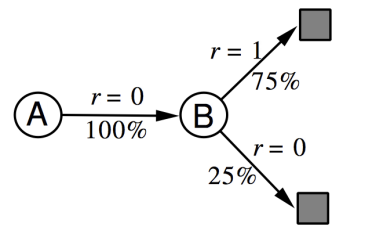
\[\widehat{P}_{ss'}^a=\frac{1}{N(s,a)}\sum_{t=1}^n1(S_t,A_t,S_{t+1}=s,a,s')\\ \widehat{R}_{s}^a=\frac{1}{N(s,a)}\sum_{t=1}^n1(S_t,A_t=s,a)R_t\]当然,这种基于表格的方式,仅仅适用于离散且维度不大的情况。并且模型的泛化能力依赖于训练数据,如果,缺少某个状态下的训练数据,那么模型肯定是学习不到这个状态的。在学习出model之后,就可以使用planning了。在model-based RL中还有一个特别的planning方法,叫做Sample-based Planning。这种方法简单有效。它先通过训练数据学习出一个模型,然后使用这个模型再模拟/采用出更多的样本,最后再使用model-free的方法(比如Q-learning, sarsa, MC等等)求出policy或者value function。比如给定state空间是{A,B}和训练episode数据(state, reward):
\[A,0,B,0\\ B,1\\ B,1\\ B,1\\ B,1\\ B,1\\ B,1\\ B,0\]我们可以通过table lookup的方法,得到下面的dynamics
那么,如果使用sample-based planning方法,我们需要对这个dynamics就行采样,比如得到一些采样episode:
\[B,1\\ B,0\\ B,1\\ A,0,B,1\\ B,1\\ A,0,B,1\\ B,1\\ B,0\]最后,我们便可以在采样数据上使用model-free的方法学习policy或者value了,比如使用MC的方法(用episode的return来近似)可以得到$V(A)=1,V(B)=0.75$。一个随之而来的问题就是,采样数据不一定可靠(取决于所学习到的model),那为什么结合训练数据一起使用呢?可以的,这就是Dyna算法
10.2.1.2 Dyna
既然我们有了来源于真实MDP的数据和源于学习到的MDP的数据,那么自然我们可以把他们合起来,学习一个更好的policy或者value function。Dyna就是这样的算法,他的思想可以用下面的图表示:
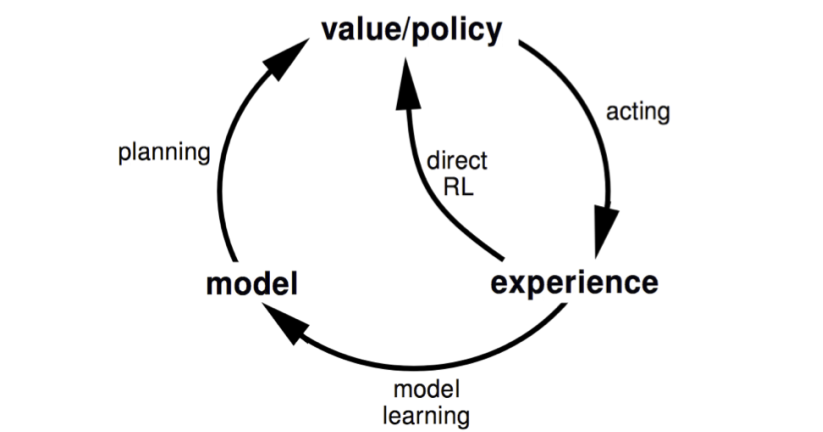
Dyna如果建立上sample-based planning方法上,那么采样的数据将用于planning,这里planning选用的是model-free的q-learning,真实的数据也是通过Q-learning来更新value function。具体来说dyna的伪代码如下:
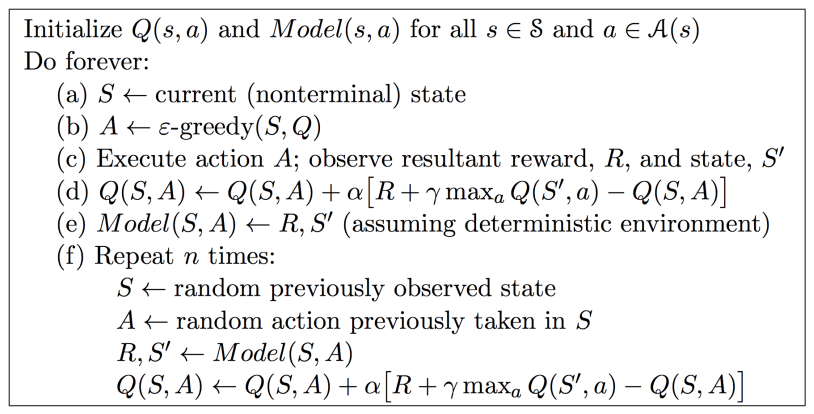
第d步用真实数据更新value,e步学习dynamics,f步则是planning。Dyna的步骤很简单,而且效果也很好
10.2.2 Fitting local dynamic model
要找到一个global model来很好的拟合所有state和action是非常困难的,这样学到的模型本身也是非常复杂的,对于有效task来说,dynamics本身会比policy要复杂。如果要用RL来做红绿灯控制,那么去学习该路口(和其附近)的路况,一定比学习我国所有道路的路况,要容易而且有效很多。这时候,local model就会比较好。
10.2.2.1 Fit with iLQR
在上一章的trajectory optimization部分介绍的LQR/iLRQ就可以用作一个local model
\[\min_{a_1,... ,a_T} \sum_{t=1}^T c(s_t,a_t) \mbox{ s.t. } s_t=f(s_{t-1},a_{t-1})\\ \min_{a_1,... ,a_T} c(s_1,a_1) + c(f(s_1,a_1),a_2)+...+c(f(f(...)),a_T)\]比如,我们假设使用linear model $f(s_{t},a_{t})\approx w_{t}s_{t}+b_{t}a_{t}$来拟合每一个local dynamics,还可以在考虑高斯noise,$P(s_{t+1}\mid s_{t},a_{t})=N(f(s_{t},a_{t}),\Sigma)$。这样在LQR中,每次迭代他都反馈回来一个线性的dynamics(x就是s,u就是a)。
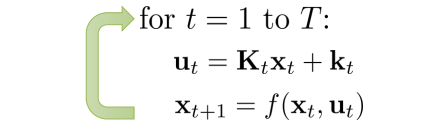
所以,我们可以使用他来快速找到local dynamics
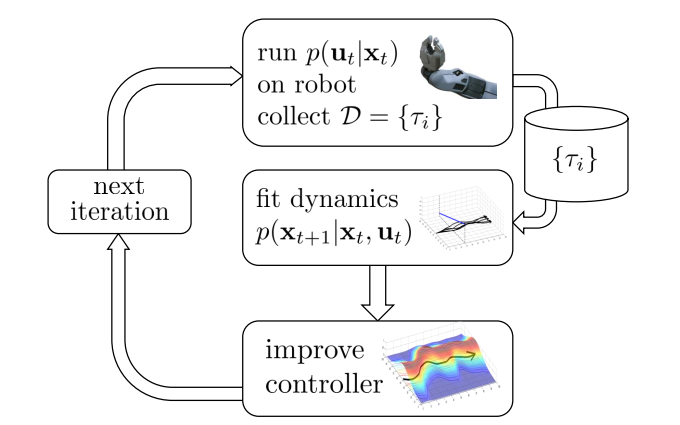
在这个设定下,图中的fit dynamics就是指去求解f中的参数w和b了,图中的$p(a_{t}\mid s_{t})$可以取不同的值
- 使用iLQR:
- 考虑noise:
其中$\Sigma_{t}=Q_{a_{t},a_{t}}^{-1}$是一个推荐取值。因为在iLQR中,如果变化动作a,导致Q(这里的Q表示cost to go,不是reward to go)变化很大的话,$Q_{aa}$的值也会变得很大。这时候表示动作a的选择比较敏感。
10.2.2.2 Local model is too local
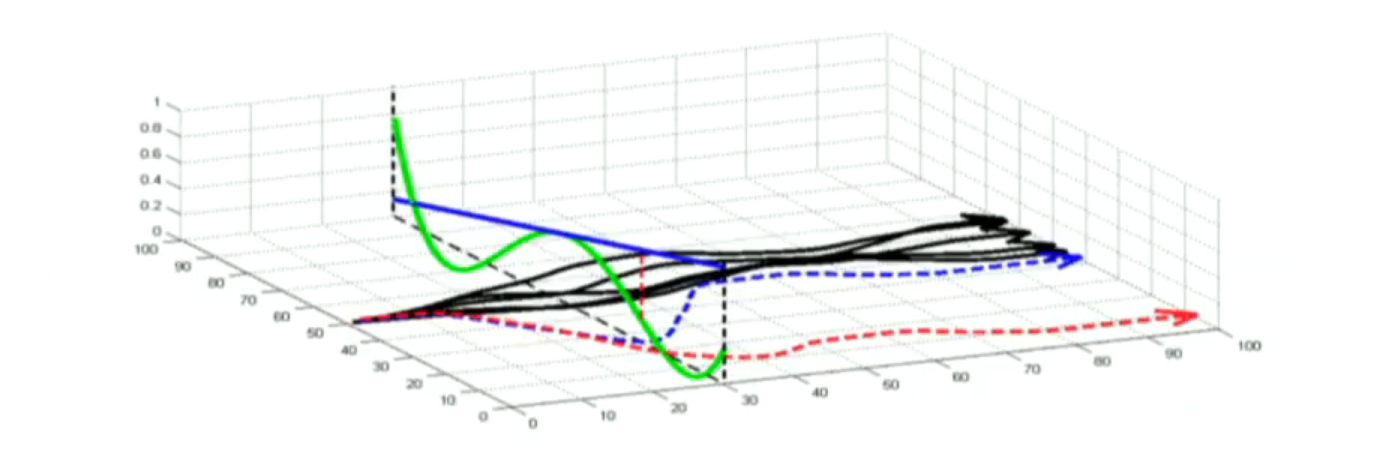
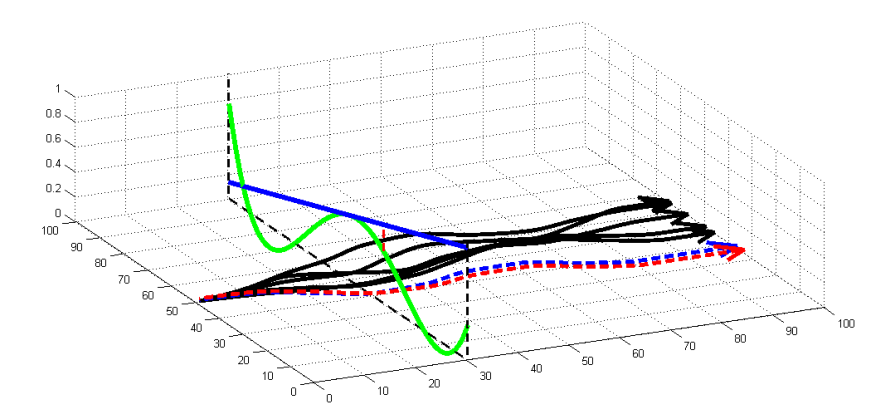
然而,local model的问题在于,local model没有普适性,local information只适用于local。比如下面的图,蓝色实线是学习到的local linear dynamics,绿线是真实的。如果一直使用蓝色实线所planning到的policy来走的话,可能会越走越错(蓝色虚线是planning的预想结果,红色虚线是真实执行的结果)。产生这样的原因就是local model overfits local state。
对于这个问题来说,如果我们约束trajectory distribution都分布得比价紧密,那么local dynamics之间也会变得比较紧密
这里trajectory的分布是通过KL散度来衡量的。其中H函数表示熵
\[D_{KL}(P(\tau)\mid\mid \widehat{P}(\tau))=E_{P(\tau)}\left[ \sum_{t=1}^T logP(a_t\mid s_t) -log\widehat{P}(a_t\mid s_t)\right]\\ =\sum_{t=1}^TE_{p(s_t,a_t)} \left[ logP(a_t\mid s_t) -log\widehat{P}(a_t\mid s_t)\right]\\ =\sum_{t=1}^TE_{p(s_t,a_t)} \left[ -log\widehat{P}(a_t\mid s_t) - H(P(a_t\mid s_t))\right]\]那么,结合KL散度的约束,可以写成下面的优化问题
\[\min_P \sum_{t=1}^T E_{P(s_t,a_t)}[c(s_t,a_t)] \mbox{ s.t. } D_{KL}(P(\tau)\mid\mid \widehat{P}(\tau)) \leq \epsilon\]这个问题可以通过dual gradient descent来求解。下图的L函数表示拉格朗日
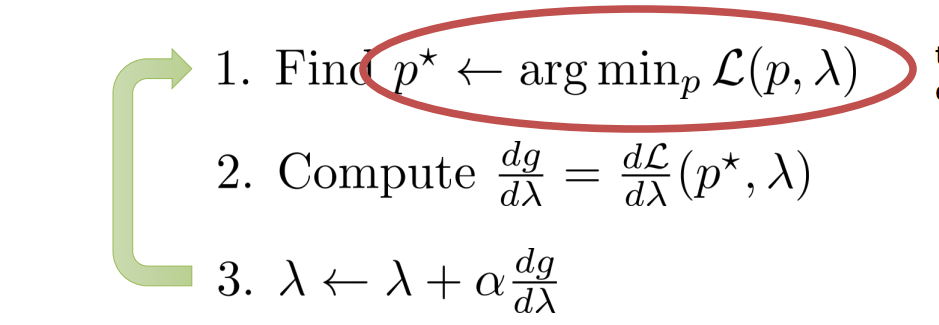
对于第一步的求解,即:
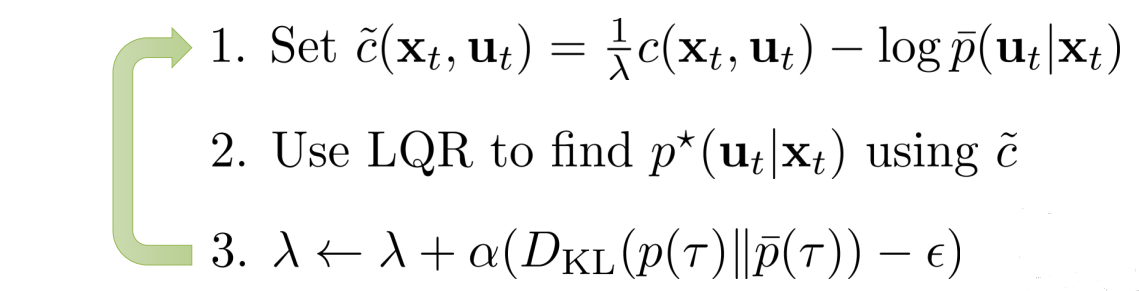
\[\min_P \sum_{t=1}^T E_{P(s_t,a_t)}[c(s_t,a_t) - \lambda log\widehat{P}(a_t\mid s_t) - \lambda H(P(a_t\mid s_t))] -\lambda \epsilon\]它的求解要用到iLQR的一个等价理论:iLQR在高斯噪声下的优化问题等价于下式:
\[\min_P \sum_{t=1}^T E_{P(s_t,a_t)}[c(s_t,a_t) - H(P(a_t\mid s_t))]\]所以,dual gradient descent的第一步可以通过令$\widehat{c}(s_{t},a_{t})=\frac{1}{\lambda}c(s_{t},a_{t})-log\widehat{P}(a_{t}\mid s_{t})$,然后通过iLQR来求解
最后,local和global的方法也可以合起来用,比如用贝叶斯模型来拟合local model,把global model以先验的形式加入。
10.3 Learn model and policy
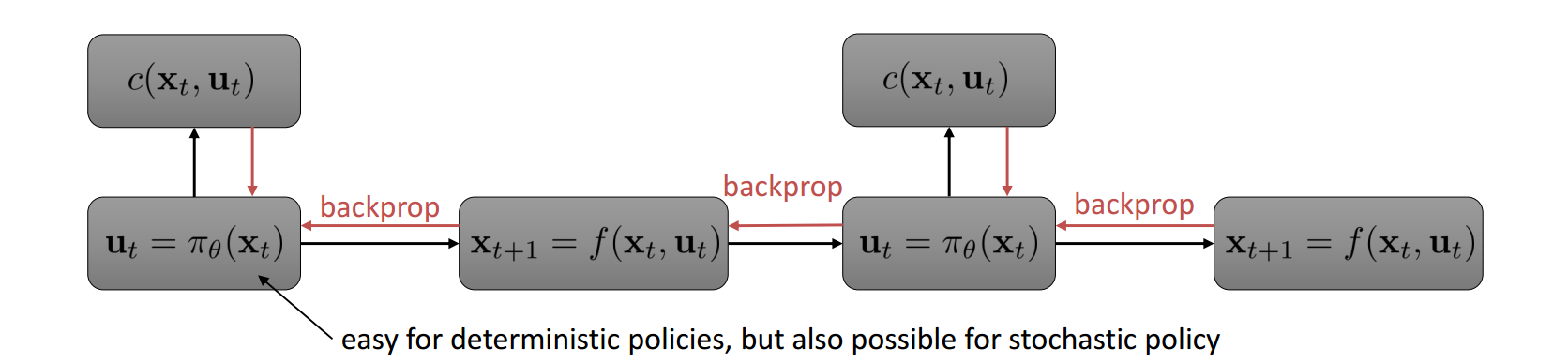
model-based planning太慢(比如要做数据曾广,要做re-planning等等),难以给出实时响应,所以还是直接用policy比较好。比如打羽毛球时先根据环境和羽毛球的速度角度等等,planning一下落球点,然后跑过去接球。这个过程如果能得到一个好的接球policy的话,那么以后别人扔飞盘,就能不用重新planning一下,才能接了。所以policy隐含有更好的泛化能力。如果,我们能知道dynamics,那么整个序列决策过程可以用下图表示,那么就可以像deep model一样做back propagation
实际上,这个问题和前面的trajectory optimization相关,但是难度加大了。因为这里引入了policy,而policy把各个状态转换紧密耦合在一起了。所以需要在做planning的时候,还学习policy。或者说是有指向性的planning出一些样本,来引导policy的学习,也就是guided policy search。在加入policy之后,整个问题在trajectory optimization的基础上,变成了constrained trajectory optimization
\[\min_{a_1,... ,a_T,s_1,...,s_T, \theta} \sum_{t=1}^T c(s_t,a_t) \mbox{ s.t. } s_t=f(s_{t-1},a_{t-1}), a_t=\pi_\theta(s_t)\\ \mbox{简化:}\min_{\tau, \theta} c(\tau) \mbox{ s.t. } a_t=\pi_\theta(s_t)\]上面的问题可以通过增广拉格朗日法+dual gradient descent来解。使用曾广拉格朗日的原因是为了通过L2项来增加求解的稳定性。下面伪代码中的$L$就是增广拉格朗日。
\[L(\tau,\theta,\lambda)=c(\tau)+\sum_{t=1}^T\lambda_t(\pi_\theta(s_t)-a_t) + \sum_{t=1}^T\delta_t(\pi_\theta(s_t)-a_t) ^2\]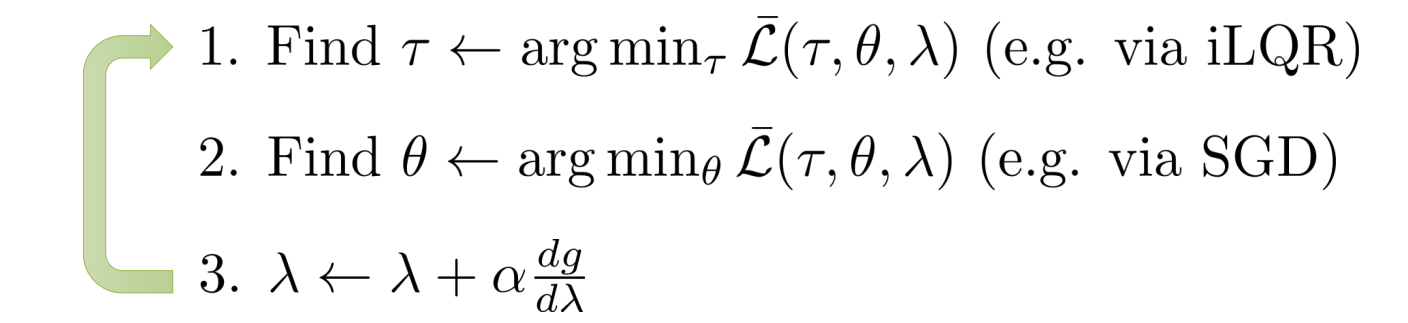
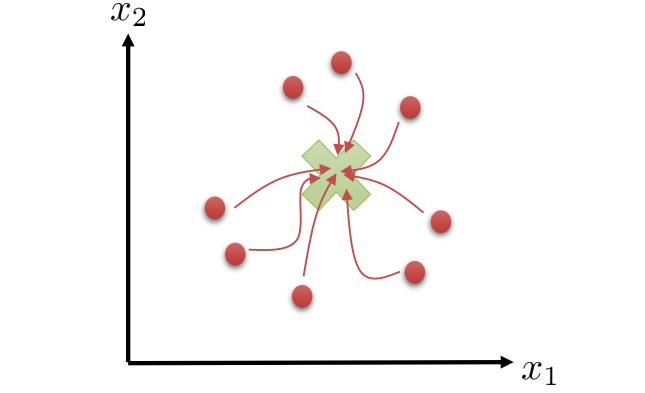
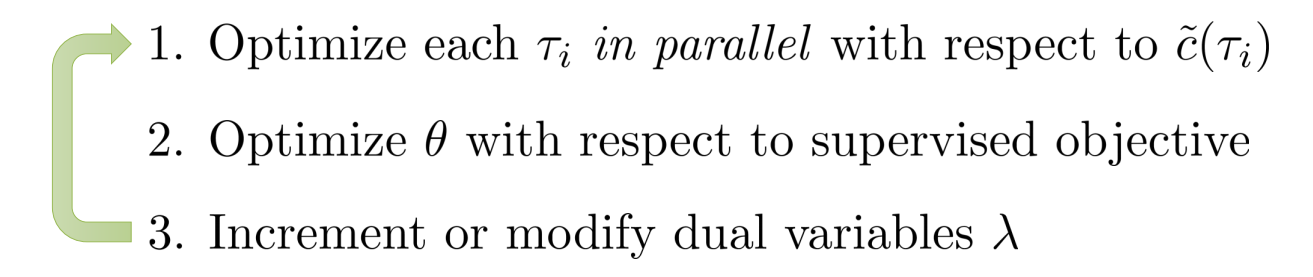
伪代码中的第二步,在求解policy的时候,已经不再是紧耦合的了,而是一个普通iid的监督学习,这就方便优化求解了。整个过程可以看做是一个guided policy search,第一步planning出最好的样本,然后将这个样本用于引导policy有更好的更新。当然这个过程也可以在多个trajectory之间并行,因为一条trajectory引导得到的policy,它的泛化性能还不高。比如,policy只适用于从一个state出发的情况。一个好的policy,无论从迷宫的那个地方进入,都要走得出去才可以。下图就是一个multiple trajectory的示意图,叉就是目标task,其他的表示不同的trajectory。
这时候的目标变成:
\[\min_{\tau_1,...,\tau_N, \theta} \sum_{i=1}^N c(\tau_i) \mbox{ s.t. } a_{t,i}=\pi_\theta(s_{t,i})\]这里可以在第一步里并行求解(分布式机器学习还是很有用的)
11. Soft optimality, Inference and Control
我们在一开始引入强化学习的时候,就说强化学习是建立在Reward Hypothesis之上的:所有的RL task都可以通过最大化累计reward的方式来实现。所以无论是通过deterministic policy或者是Stochastic policy,RL都想要找出一个最好的策略(arg max)
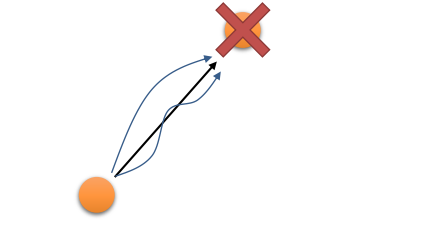
\[a_1,...,a_T=\arg\max_{a_1,...,a_T}\sum^T_{t=1} \gamma^{t-1}r(s_t,a_t) \mbox{ s.t. }s_{t+1}=f(s_t,a_t)\\ \pi=\arg\max E_{s_{t+1}\sim P(s_{t+1}\mid s_t,a_t),a_t\sim \pi(a_t \mid s_t)}[\gamma^{t-1}r(s_t,a_t)]\]但是,这种方式并不能完全刻画人类的真实行为。人类真实行为含有随机性,它往往是次优的。以下图为例,如果我们需要从一个地方跑去另一个地方,当然两点之间线段最短,所以最优的方案是走黑色的直线。但是相比于人,猴子却有可能走其他的方案(图中曲线),同样也能到达目的地。这些方案虽然本身并不是最优,但是他们所带来的累计reward可能与黑线的差异并不大。因此,我们更希望去刻画这种带有随机性的次优行为,也就是Soft optimality。这种随机性会导致行为选择不是最优的,带来一定mistake,但是,只要最后能较好的完成task,这些mistake也是可容忍的。在这个例子里,猴子真的不会关心要不要走直线,只要能(较快地)到达目的地就行了。最后,这种随机性的出现,也增大了exploration的机会,RL也会更加的鲁棒。
11.1 Soft optimality and PGM
为了刻画这种行为,之前的那些argmax的方法就不太适用了。因为模型需要保证能以一定的概率选中次优的动作,并且也要能尽量最大化累计reward。对于这种以概率的序列决策过程,可以采用PGM,也就是概率图模型(Probabilistic Graphical Model),对于RL来说,PGM是长成这样的:
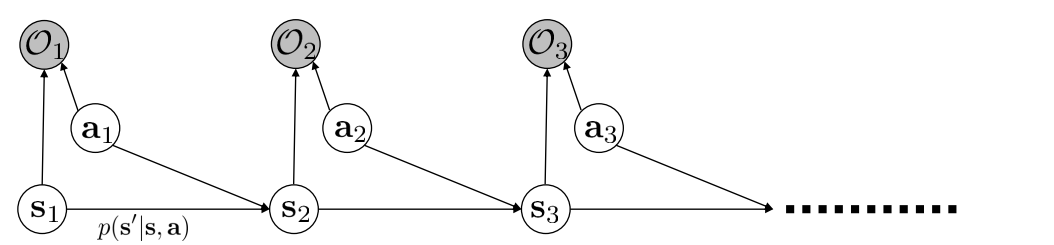
PGM常常是用阴影的圆表示已观察值,空心表示未知变量(也就是state和action)。这里的变量$O$表示agent的goal或者intention。比如可以让$O$是0/1取值,表示猴子是不是想要接近目的地。是就$O_{t}=1$,否则是0。如此,我们便可以使用$P(\tau \mid O_{1:T})$表示在猴子为了要达到一定goal的条件下,这条trajectory的概率是多少。
对于这个式子,可以使用贝叶斯公式展开。第三个公式是对上面的PGM用了马尔科夫的条件独立性。给定$\tau$,$O_{t}$是相互条件独立的。并且对于单个的$O_{t}$可以通过父节点($s_{t},a_{t}$)确定。
\[P(\tau \mid O_{1:T})=\frac{P(\tau)P(O_{1:T}\mid \tau)}{P(O_{1:T})} \propto P(\tau) \prod_t P(O_t \mid s_t,a_t)\]一般来说,会取值$P(O_{t}\mid s_{t},a_{t}) \propto exp(r(s_{t},a_{t}))$。这样带入上式,可以得到下式。这个式子的含义就是我们会倾向于去选择那些累计reward大,并且出现概率高的trajectory $\tau$。由于$P(\tau \mid O_{1:T})$是一个概率,所以,如果还有别的trajectory,它的累计reward也比较大,出现概率也比较高的话,那么它也可能被选中,也就达到了soft optimality的目的。
\[P(\tau \mid O_{1:T}) \propto P(\tau) exp(\sum_t r(s_t,a_t))\]那么问题来了,怎么求解?在PGM中,这种给定观测值,求解隐变量的后验分布的问题叫做inference(可以回想HMM的例子,在给定观察值下,去求解state)。在本文中,inference分为三个部分
- 计算backward message $\beta_{t}(s_{t},a_{t})=P(O_{t:T}\mid s_{t}, a_{t})$
- 计算policy $P(a_{t} \mid s_{t}, O_{1:T})$
- 计算forward message $\alpha_{t}(s_{t})=P(s_{t}\mid O_{1:t-1})$
11.2 Inference
后面的推到会用到这个PGM的结构,所以放这里方便查阅
11.2.1 Backword message
从backward message $\beta_{t}(s_{t},a_{t})=P(O_{t:T}\mid s_{t}, a_{t})$的形式可以得到一些信息:比如当t=1时刻,给定s1,a1,$O_{1}$和$S_{2}$是条件独立的,$O_{1}$和$O_{2:T}$也是条件独立的。也就是说:
\[\beta_{t}(s_{t},a_{t})=P(O_{t:T}\mid s_{t}, a_{t})=P(O_t\mid s_t,a_t)P(O_{t+1:T}\mid s_t,a_t)\]而$P(O_{t}\mid s_{t},a_{t}) \propto exp(r(s_{t},a_{t}))$是已知的。所以我们的策略就是通过引入下一时刻的$s,a$,使得分解出更多的$P(O_{t}\mid s_{t},a_{t})$。所以有:
\[\beta_{t}(s_{t},a_{t})=P(O_{t:T}\mid s_{t}, a_{t})=\int P(O_{t:T}, s_{t+1}\mid s_{t}, a_{t}) ds_{t+1}\\ =\int P(O_t,O_{t+1:T}, s_{t+1}\mid s_{t}, a_{t}) ds_{t+1} \\ =\int P(O_{t+1:T}\mid s_{t+1})P(s_{t+1}\mid s_{t}, a_{t}) P(O_t\mid s_t,a_t) ds_{t+1}\\ =P(O_t\mid s_t,a_t)\int P(O_{t+1:T}\mid s_{t+1})P(s_{t+1}\mid s_{t}, a_{t}) ds_{t+1}\]上面的式子,第二项是dynamics,第三项$P(O_{t}\mid s_{t},a_{t}) \propto exp(r(s_{t},a_{t}))$。我们把第一项$P(O_{t+1:T}\mid s_{t+1})$,令为$\beta_{t+1}(S_{t+1})$。我们继续把下一时刻的a加进去:
\[P(O_{t+1:T}\mid s_{t+1})=\int P(O_{t+1:T},a_{t+1}\mid s_{t+1}) da_{t+1}\\ =\int P(O_{t+1:T}\mid s_{t+1},a_{t+1})P(a_{t+1}\mid s_{t+1}) da_{t+1}\]积分里的第一项就是下一时刻的backward message $\beta_{t+1}(s_{t+1},a_{t+1})$。而第二项$P(a_{t+1}\mid s_{t+1})$,他看起来像个policy,但是它不是task-oritented,所以在这里,他不是policy。或者说,他是一个policy priori,因为他没有goal,仅仅是说在某个状态下,可能采取的action分布是啥,因此完全可以认为他是一个uniform Distribution,取一个定值。
因此,我们可以倒着求出$\beta$的值。注意$\beta_{T}(s_{T},a_{T})=P(O_{T}\mid s_{T},a_{T})\propto exp(r(s_{T},a_{T}))$

这个更新过程看起来很繁琐,其实,如果做一个变量替换,就会有一些不得了的发现。现在令:
\[V_t(s_t)=\log \beta_t(s_t)\\ Q_t(s_t,a_t)=\log\beta_t(s_t,a_t)\]那么结合$\beta_{t}(s_{t})=\int P(a_{t}\mid s_{t})\beta_{t}(s_{t},a_{t})da_{t}$,可以得到下面这个神奇的式子:
\[V_t(s_t)=\log \int P(a_t \mid s_t) \exp(Q_t(s_t,a_t))da_{t}=\log \int \exp(\log P(a_t \mid s_t) + Q_t(s_t,a_t))da_{t}\\ Q_t(s_t,a_t)=r(s_t,a_t)+\log E_{s_{t+1} \sim P(s_{t+1}\mid s_t,a_t)}[exp(V_{t+1}(s_{t+1}))]\]-
第一个式子的神奇之处就在于,他可以视作一个Soft max(不是神经网络里的softmax),是一种松弛的,用来求最大化的算子。在$Q_{t}(s_{t},a_{t})$变得很大的时候,$V_{t}(s_{t}) \rightarrow \max_{a_{t}}Q_{t}(s_{t},a_{t})$(注意,这里仍然假设$P(a_{t}\mid s_{t})$是uniform distribution。如果假设他是uniform的话,那么可以把$P(a_{t}\mid s_{t})$看做是reward的一部分:$\widehat{r}(s_{t},a_{t})=r(s_{t},a_{t})+\log P(a_{t}\mid s_{t})$)。
-
对于第二个式子来说
-
考虑deterministic transition的情况,就可以把期望用一个确定的转移状态替换:
\[Q_t(s_t,a_t)=r(s_t,a_t)+V_{t+1}(s_{t+1})\] -
有其他理论工作进一步可以将式子2改成下式:
-
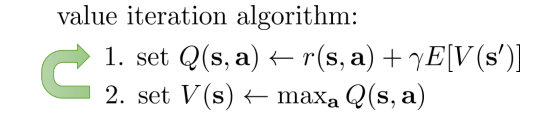
整个backward message的计算过程就很像value iteration了。它先计算Q,然后对Q取soft max 来得到V。而value iteration则是直接最大化Q
最后,以上的推到都基本没有考虑discount factor,但是也是可以加上去的,比如:
\[Q_t(s_t,a_t)=r(s_t,a_t)+\gamma E[V_{t+1}(s_{t+1})]\]另一个比较好的改进是加入explicit temperature $\alpha$。当$\alpha \rightarrow 0$的时候,这个soft max就无限接近于hard max了
\[V_t(s_t)=\alpha \log \int \exp( \frac{\log P(a_t \mid s_t) + Q_t(s_t,a_t)}{\alpha})da_{t}\]11.2.2 policy
对于policy $\pi(a_{t} \mid s_{t})=P(a_{t} \mid s_{t}, O_{1:T})$的计算,只用贝叶斯方法就行了
\[\pi(a_{t} \mid s_{t})=P(a_{t} \mid s_{t}, O_{1:T})=\frac{P(a_t , s_t \mid O_{1:T})}{P(s_t\mid O_{1:T})}\\ =\frac{P(O_{1:T} \mid a_t,s_t)P(a_t,s_t)/P(O_{1:T})}{P( O_{1:T}\mid s_t)P(s_t)/P(O_{1:T})}\\ =\frac{\beta_t(s_t,a_t)}{\beta_t(s_t)}P(a_t|s_t)\]这里仍然假设$P(a_{t}\mid s_{t})$是uniform的,所以进一步推得到policy其实是一个指数加权的advance function。他的含义就是,soft optimality是选择那些好于“平均水平”的动作,而不是单纯的选能最大化advance的动作。动作的选择概率等价于到底这些动作要好于平均多少(需要提前归一化成概率值)。
\[\pi(a_{t} \mid s_{t})=\frac{\beta_t(s_t,a_t)}{\beta_t(s_t)}=\exp(Q_t(s_t,a_t)-V_t(s_t))=\exp(A_t(s_t,a_t))\]考虑到explicit temperature。当$\alpha \rightarrow 0$的时候,就趋近于做的是greedy policy
\[\pi(a_{t} \mid s_{t})=\exp(\frac{Q_t(s_t,a_t)-V_t(s_t)}{\alpha})=\exp(A_t(s_t,a_t)/\alpha)\]11.2.3 forward mesage
最后来看forword message $\alpha_{t}(s_{t})=P(s_{t}\mid O_{1:t-1})$的计算(注$\alpha_{1}(s_{1})=P(s_{1})$,通常来说,初始状态是知道的)。
\[\alpha_{t}(s_{t})=P(s_{t}\mid O_{1:t-1})=\int P(s_t,s_{t-1},a_{t-1}\mid O_{1:t-1})ds_{t-1}da_{t-1}\\ =\int P(s_{t}\mid s_{t-1},a_{t-1})P(a_{t-1}\mid s_{t-1},O_{t-1})P(s_{t-1}\mid O_{1:t-2})ds_{t-1}da_{t-1}\]积分式子里的第一项是dynamics,第三项是$\alpha_{t-1}(s_{t-1})$,对于第二项来说:
\[P(a_{t-1}\mid s_{t-1},O_{t-1})=\frac{P(O_{t-1}\mid s_{t-1},a_{t-1})P(a_{t-1}\mid s_{t-1})}{P(O_{t-1} \mid s_{t-1})}\]对于这个式子,分子的第一项$P(O_{t-1}\mid s_{t-1},a_{t-1}) \propto \exp(r(s_{t-1},a_{t-1}))$,第二项如果仍然假设是uniform的,这时候分母是$P(O_{t-1}\mid s_{t-1},a_{t-1}) )$的一个normalization。所以:
\[\alpha_{t}(s_{t})=P(s_{t}\mid O_{1:t-1}) \\ \propto \int P(s_{t}\mid s_{t-1},a_{t-1}) \exp(r(s_{t-1},a_{t-1}))\alpha_{t-1}(s_{t-1})ds_{t-1}da_{t-1}\]11.2.4 Inference in action
最终我们要求解的是$P(s_{t}\mid O_{1:T})$。他可以通过前后向message得到:
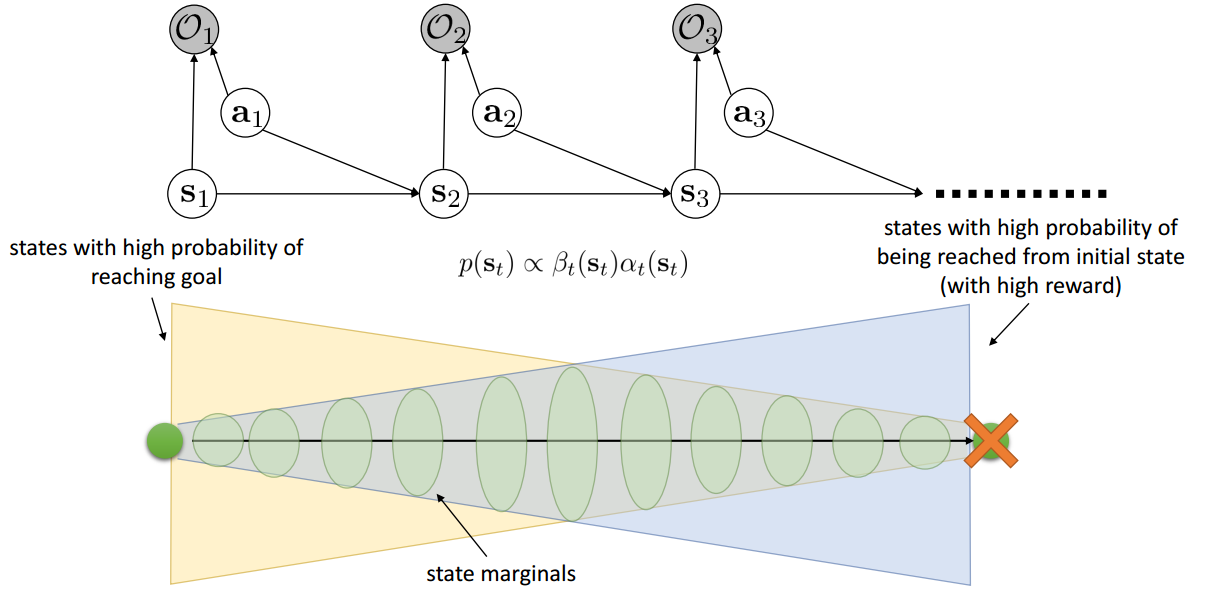
\[P(s_{t}\mid O_{1:T})=\frac{P(s_t,O_{1:T})}{P(O_{1:T})}=\frac{P(O_{t:T}\mid s_{t})P(s_t,O_{1:t-1})}{P(O_{1:T})}\\ \propto \beta_t(s_t)\alpha_t(s_t) P(O_{1:t-1}) \propto \beta_t(s_t)\alpha_t(s_t)\]从下面的示意图可以看出:
- 前向信息$\alpha_{t}(s_{t})=P(s_{t}\mid O_{1:t-1})$表示观察到t-1时刻之前的intention,能到达到$s_{t}$状态的概率是多少(intention观察到越多,也就下一时刻的状态能被推测出的概率也就越大(前提是为了要接近目的地而设置的reward)。图右端大,左边窄)。
- 后向信息$\beta_{t}(s_{t},a_{t})=P(O_{t:T}\mid s_{t}, a_{t})$表示从给定时刻t开始,完成goal的概率是多少(图左端大,右边窄)。
- 所以从两个的定义来看,给定整个goal序列,那么某个时刻t,处于某一个状态的概率的大小就等价于前后向信息的乘积(从1到达t,以及从t到达T的概率乘积)
11.3 Together with soft optimality
有了soft optimality,就可以把之前的经典算法(比如Q-learning,policy gradient等等)中的max,用soft max替换;greedy policy用soft policy替换,这样更有利于做exploration,允许次优的动作,更加鲁棒等等的好处。
11.3.1 Q-learning with soft optimality
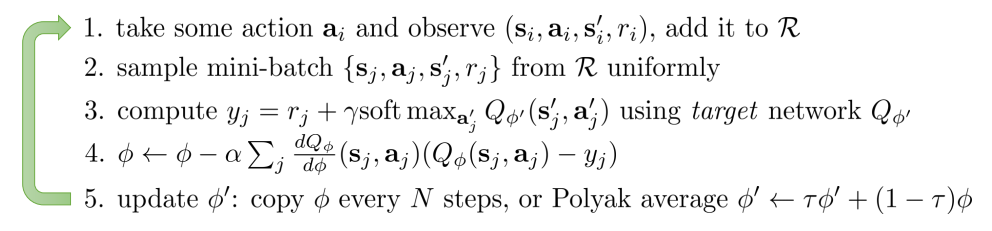
Q-learning是一个model-free off-policy的方法,他通过直接最大化Q来贪心的优化policy。这里off-policy是指采样数据不是来自policy本身,而是来自$\max_{a} Q(s,a)$。假设我们仍然采用function approximation,并且和target之间的loss选择L2,那么Q-learning的更新式子为:
\[\phi \leftarrow \phi + \alpha \triangledown_\phi Q_\phi(s,a) \left( r(s,a) + \gamma V(s')- Q_\phi(s,a) \right)\]其中,Q-target中$V(s’)=\max_{a} Q_\phi(s’,a’)$。现在把他用soft max替换(这里略去了那个uniform项),随之policy也改为soft的
\[V(s')=\log \int \exp(Q_\phi(s',a'))da'\\ \pi(a\mid s)=\exp(A(s,a))\]算法的伪代码可以用下面表示:
11.3.2 Policy gradent with soft optimality
从理论上来说:当policy gradient的policy采用$\pi(a\mid s)=\exp(A(s,a))$,那么等价于最大化下式。这个式子相比于之前的方法,多了一项policy entropy $H(\pi(a\mid s_{t}))=E_{\pi(a_{t}\mid s_{t})}[-\log \pi(a_{t}\mid s_{t})]$。相当于是加了一个最大熵的正则
\[\max \sum_t E_{\pi(s_t,a_t)} [r(s_t,a_t)] + E_{\pi(s_t)}[H(\pi(a_t\mid s_t))]=\sum_t E_{\pi(s_t,a_t)}[r(s_t,a_t)-\log \pi(a_t\mid s_t)]\]第二项起到了一个最大熵模型的作用,整个式子就是最大化累计reward的同时,policy的熵最大。保证那些能最大化return的policy都有可能被选中。往深入来说,加入soft optimality之后的policy gradient和Q-learning是有联系的:
\[\mbox{Soft policy gradient: }\frac{1}{N}\sum_t\sum_t\left( \triangledown_\theta Q(a_t\mid s_t) - \triangledown_\theta V(s_t)\right) \left( r(s_t,a_t) + Q(s_{t+1},a_{t+1})-Q(s_t,a_t)) \right)\\ \mbox{Soft Q-learning: }-\frac{1}{N}\sum_t\sum_t \triangledown_\theta Q(a_t\mid s_t) \left( r(s_t,a_t) + soft max Q(s_{t+1},a_{t+1})-Q(s_t,a_t)) \right)\\\]- policy gradient是在advanced function的基础上的gradient ascent,Q-learning是在Q函数的基础上的gradient descent
- Q-learning的off-policy体现在soft max上。这里也可以使用on-policy的sarsa,这时候就没有soft max了,而是和policy gradent中的那一项一样
12. Inverse Reinforcement Learning
在model-based RL章节里,提到过用table lookup的方法来学习reward function,但是所学到的模型的泛化能力依赖于训练数据。实际上在现实的问题中,dynamics是不一定能提供reward的,比如在部分游戏中,可能会有score broad来提供reward,但是还有很多应用下,是没办法由dynamics给出reward function的。这种情况下,一般是由专家知识给定,但是太浪费人力了,也太依赖专业知识了。所以,缺失reward的问题限制了很多RL的应用场景。
那么,reward能不能通过学习出来?这个问题就是inverse RL 要解决的。IRL是想学习出一个reward function,并且再用它来学习一个policy。IRL对于reward的学习策略的核心思想,在于以专家(expert)为模子,通过expert的行为去推测task是什么,从而学习reward function应该怎么设置(才能让expert的return最大)。比如在下面这个gif里,研究人员试图去捡起地上的东西,但是够不着,旁边的小朋友推测出研究人员的意图之后,主动的帮忙捡了起来。在这个例子里,捡东西这个动作就应该被赋予更大的reward。

当然,对expert意图的推测,一方面,问题本身是很难的。如果我观察到expert把下图的圆推到了右边,但是expert是出于喜欢蓝色,讨厌红色的原因才这么做?还是说有风吹向右边,所以export顺风推到了右边?另一方面,expert的动作不一样是最优的(Soft oplimality)。

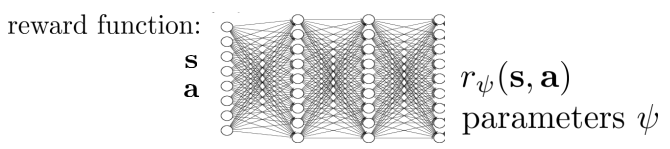
形式化来说,IRL是在给定state& action space和expert 行为样本,(以及 transition dynamics)的条件下,去学习一个reward function,并用这个reward function来进一步学习policy。这里的reward function可以自己定义他的形式,比如比较常用的linear reward function $r_\psi(s,a)=\psi^Tf(s,a)$,其中$f(s,a)$表示根据state和action提取到的特征向量,$\psi$表示reward function的参数。当然也可以使用deep network来学习reward
IRL的目标就可以表示为,$\pi^\star \approx \pi^{r_{\psi}}$。也就说,要找一个reward function r,使得r下的最优policy $\pi^{r_\psi}$要尽可能的贴近在真实reward function下的最优策略$\pi^\star$。那么,下面朝着这个目标,我们来介绍一些IRL的算法
12.1 Feature matching based IRL
IRL的目标$\pi^\star \approx \pi^{r_{\psi}}$是很难直接刻画的,但是,如果两个policy一样,那么在相同的dynamics下,他们走出来的episode就应该很相似。Feature Matching就是从这个角度出发,它意思就说,要找一个参数$\psi$使得episode的特征的期望是相等的,即下式成立
\[E_{\pi^{r_\psi}}[f(s,a)]=E_{\pi^\star}[f(s,a)]\]但是,反过来看,满足上面等式的$\psi$,不一定能使得policy是相似的。他可能会存在很多解,这些解都能match feature,但是policy会很不一样。这时候,大牛们就用了SVM的类似方法,在从多的解中选择一个能最大化margin的解,并且还要保证policy的相似性:
\[\min \frac{1}{2} \mid \mid \psi \mid \mid^2\\ \mbox{s.t. } \psi^TE_{\pi^\star}[f(s,a)] \geq \max_{\pi} \psi^TE_{\pi}[f(s,a)] + D(\pi, \pi^\star)\]上面式子的约束条件整体是一个adaptive margin的样子,松弛变量是D,它刻画了policy之间的差异。然后在原始feature match的基础上,还与$\psi$做了内积,表示一个average reward。所以,约束表示保证policy相似的情况下,reward尽可能的与真实值接近。问题就是,这个解确实不好求。而且,最大间隔这个假设对不对还是挺arbitrary。
12.2 MaxEnt IRL
考虑到expert的动作可能不是最优的,那么就可以借用上一章的soft optimality的方法,把PGM inference和学习reward function相结合(如下式)。这时候PGM中的goal不在是已知的了,而是需要去学习的,但是我们拥有一些expert的episode数据,所以s,a是已知的。
\[P(\tau \mid O_{1:T}) \propto P(\tau) \exp\left( \sum_t r_\psi(s_t,a_t) \right)\]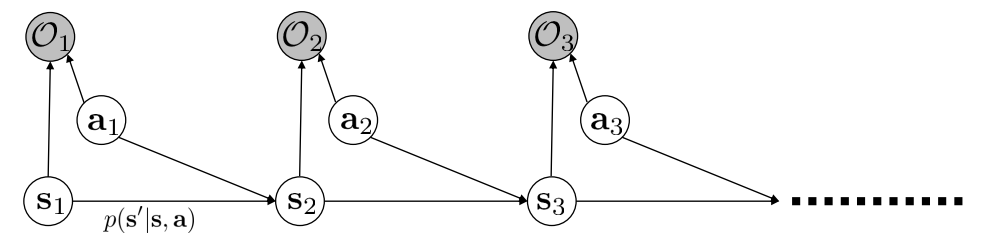
那么问题就转化为PGM中的参数学习,只需要最大化likelihood $\log P(\tau \mid O_{1:T}, \psi)$就可以了。这里我们把$P(\tau)$给省略了,因为它和参数无关,所以$P(\tau \mid O_{1:T}, \psi)$只需要简单的归一化,其中$Z$是normalizer。
\[P(\tau \mid O_{1:T}, \psi)=\frac{P(\tau \mid O_{1:T}, \psi)}{\int P(\tau \mid O_{1:T}, \psi) d\tau}=\frac{P(\tau \mid O_{1:T}, \psi)}{Z}\\ \max_\psi \frac{1}{N} \sum_{i=1}^N \log P(\tau_i \mid O_{1:T}, \psi)=\frac{1}{N} \sum_{i=1}^N r_\psi(\tau_i) - \log Z\]咋一看,上面式子里的Z,就和PGM中MRF中的normalizer一样的讨厌,因为它对参数的导数不好求。但是在这里是个特例,他可以化解成一个简洁的形式。当对上式求导的时候,有下式成立(注意$P(\tau \mid O_{1:T}) = P(\tau) \exp\left( \sum_{t} r_\psi(s_{t},a_{t}) \right) / Z$)
\[\triangledown_\psi L= \frac{1}{N}\sum_{t=1}^N \triangledown_\psi r_\psi(\tau_i) - \frac{1}{Z} \int P(\tau) \exp(r_\psi(\tau)) \triangledown_\psi r_\psi(\tau) d\tau\\ =E_{\tau \sim \pi^\star(\tau)} [\triangledown_\psi r_\psi(\tau)] - E_{\tau \sim P(\tau \mid O_{1:T}, \psi)}[\triangledown_\psi r_\psi(\tau)]\]上面的式子的第一项是expert的episode下的期望,第二项是当前reward下的soft policy下的采样episode下的期望。那么,我们就可以通过采样的方式来计算出导数。对于第二项来说:由于期望和求和都是线性的,那么可以交换他们的次序:
\[E_{\tau \sim P(\tau \mid O_{1:T}, \psi)}[\triangledown_\psi r_\psi(\tau)]= \sum_{t=1}^T E_{(s_t,a_t)\sim P(s_t,a_t \mid O_{1:T}, \psi) }[\triangledown_\psi r_\psi(s_t,a_t)]\]为了计算上面的式子,首先需要求得state和action的后验概率$P(s_{t} ,a_{t} \mid O_{1:T}, \psi)$。这里可以使用贝叶斯公式:
\[P(s_t,a_t \mid O_{1:T}, \psi)=P(a_t\mid s_t,O_{1:T}, \psi) P(s_{t}\mid O_{1:T}, \psi)\]等式右边的第一项就是上一章中的policy,第二项就是上一章做的inference
\[P(a_t\mid s_t,O_{1:T}, \psi) = \frac{\beta(s_t,a_t)}{\beta(s_t)}\\ P(s_{t}\mid O_{1:T}, \psi) \propto \beta(s_t) \alpha(s_t)\\ P(s_t,a_t \mid O_{1:T}, \psi) \propto \beta(s_t,a_t)\alpha(s_t)\]计算得到$P(s_{t} ,a_{t} \mid O_{1:T}, \psi)$之后,就可以得到导数了。这个计算过程就是MaxEnt算法。下面是他的伪代码(这里有个变量替换$\mu(s_{t}, a_{t}) = P(s_{t} ,a_{t} \mid O_{1:T}, \psi)$)
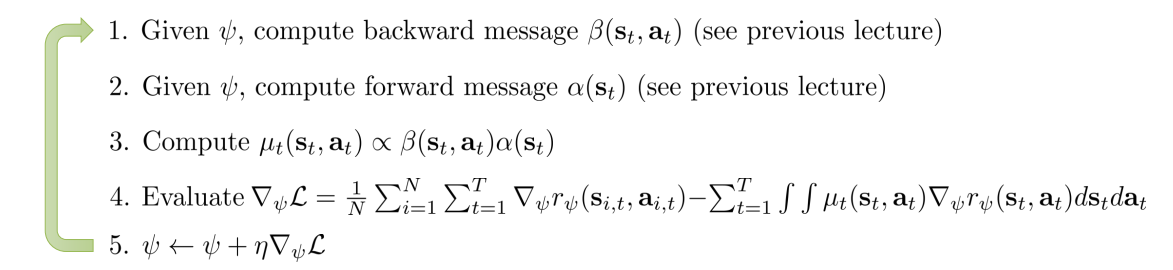
这个算法和feature matching有一定的联系。在理论上,MaxEnt算法等价的优化目标是:
\[\max_\psi H(\pi^{r_\psi}) \\ \mbox{s.t. }E_{\pi^{r_\psi}}[f(s,a)]=E_{\pi^\star}[f(s,a)]\]这个是个标准的最大熵模型(H是熵,所以叫MaxEnt算法)。他不在有最大间隔的假设,而是在满足feature matching的条件下,尽量保证学到的policy的随机性。当然,这个方法计算量太大了,根本处理不了large MDPs,并且我们需要知道transition dynamics才能计算forword和backward message 。
12.3 Sampling-based MaxEnt IRL
我们的目标是适应large MDP和连续state和action空间,以及在unknown dynamics的情况下能使用IRL。或许,一方面可以走model-based 的方法,把transition dynamics给学习出来,比如lookup table,但是累计损失会更可怕(学习transition,再学习reward,最后学policy);另一方面直接用model-free的方法,不知道transition,但是我们可以得到episode samples。
在MaxEnt中,只有求导数的时候用到了dynamics,如果可以拿到当前的policy $P(a_{t} \mid s_{t}, O_{1:T}, \psi)$,然后用这个policy sample出一些样本,那么,我们仍然是可以求得到导数的。这时候我们就需要使用expert的episode来计算第一项,用current policy samples来计算第二项
\[\triangledown_\psi L=E_{\tau \sim \pi^\star(\tau)} [\triangledown_\psi r_\psi(\tau)] - E_{\tau \sim P(\tau \mid O_{1:T}, \psi)}[\triangledown_\psi r_\psi(\tau)]\\ \approx \frac{1}{N} \sum^N_{t=1} \triangledown_\psi r_\psi(\tau_i) - \frac{1}{M} \sum^M_{j=1} \triangledown_\psi r_\psi(\tau_j)\]然而,问题在于policy的学习依赖reward。所以直接学出policy是很难的。另一种思路就是,仿照policy iteration或者value iteration一样,我们去improve current policy,而不是一次性学习到。但是这样做又会引入新的问题:样本来自一个非optimal的policy,这样计算得到的结果是有偏的。一个解决策略就是使用importance sampling(IS)!
\[\triangledown_\psi L \approx \frac{1}{N} \sum^N_{t=1} \triangledown_\psi r_\psi(\tau_i) - \frac{1}{\sum_j w_j} \sum^M_{j=1} w_j \triangledown_\psi r_\psi(\tau_j)\\ w_j = \frac{\pi^{r_\psi}(\tau_j)}{\pi^{IS}(\tau_j)}=\frac{P(\tau \mid O_{1:T})}{P^{IS}(\tau)}=\frac{P(s_1)\prod_t P(s_{t+1}\mid s_t)P(a_t\mid s_t)\exp(r_\psi(s_t,a_t))}{P(s_1)\prod_t P(s_{t+1}\mid s_t)\pi(a_t\mid s_t)}\\ =\frac{\prod_t P(a_t\mid s_t)\exp(r_\psi(s_t,a_t))}{\prod_t \pi(a_t\mid s_t)}\]这里还是假设$P(a_{t}\mid s_{t})$是uniform的,取一个定值,所以$w_{j}=\prod_{t} \frac{ \exp(r_\psi(s_{t},a_{t}))}{ \pi(a_{t}\mid s_{t})}$。所以现在可以用importance sampling的新的policy $\pi$下进行采样,再加权,用于计算导数。这样随着迭代的进行,reward的参数渐渐学习到,也渐渐的逼近optimial policy。这就是guided cost learning的大致算法框架:输入IS的$\pi$和expert数据,通过policy的来更新reward,reward也用来更新policy。
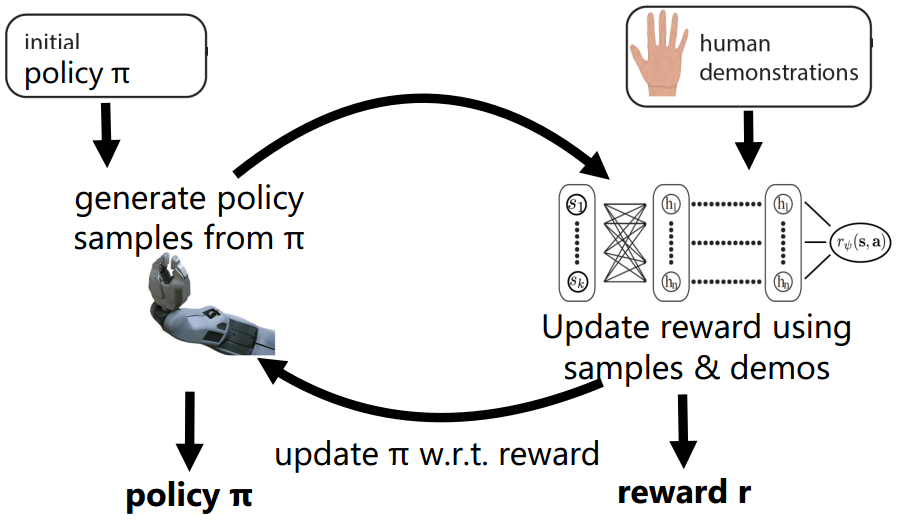
他可以在unknown transition的背景下,可以采用function approxiation的方式来近似reward与$\pi$,以处理large/continuous MDPs。
12.4 GAN & IRL
最后来看一下IRL和GAN的联系。根据一些文献的结果显示,IRL中引入的policy起到了GAN中generator的作用,而reward则是disciminator。reward要区别出expert的数据和policy生成的数据。
[NIPS’16] Generative Adversarial Imitation Learning
[ICML’17] Use learned dynamics model to backdrop through discriminator
13. Advanced Policy Gradient
我们在一开始讲了policy gradient,它想找一个policy以最大化累计reward。结合convenient identity,这个问题可以通过梯度的方法迭代求解
\[\theta^*=\arg\max_\theta E_{\tau \sim \pi_\theta(\tau)} \left[ \sum_{t=1} \gamma^{t-1} r(s_t,a_t) \right]\\ \bigtriangledown_\theta J(\theta)=E_{\tau \sim \pi_\theta(\tau)} \left[ \left(\sum_{t=1}^T \bigtriangledown_\theta log \pi_\theta(a_t\mid s_t) \right) \left( \sum_{t=1}^T \gamma^{t-1} r(s_t,a_t)\right) \right]\]甚至还可以考虑Actor-critic和reward to go的策略,通过下式求梯度,以减小方差
\[\bigtriangledown_\theta J(\theta)=E_{\tau \sim \pi_\theta(\tau)} \left[ \sum_{t=1}^T \gamma^t \bigtriangledown_\theta log \pi_\theta(a_t\mid s_t) A^{\pi_\theta}(s_t,a_t) \right]\]但是这种方法仍然有一些问题:
-
poor sample efficiency:policy gradient通常是on-policy的,每次gradient update之后,policy就变了。也就需要重新采样数据,之前的数据必须丢弃。虽然,可以考虑用importance sampling变成off-policy policy gradient:
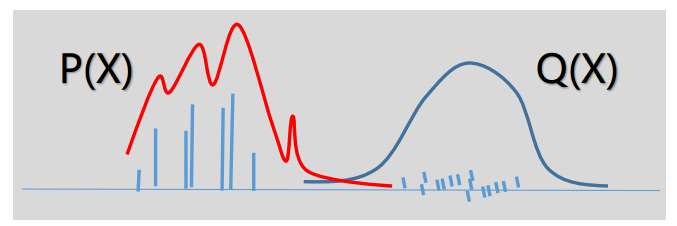
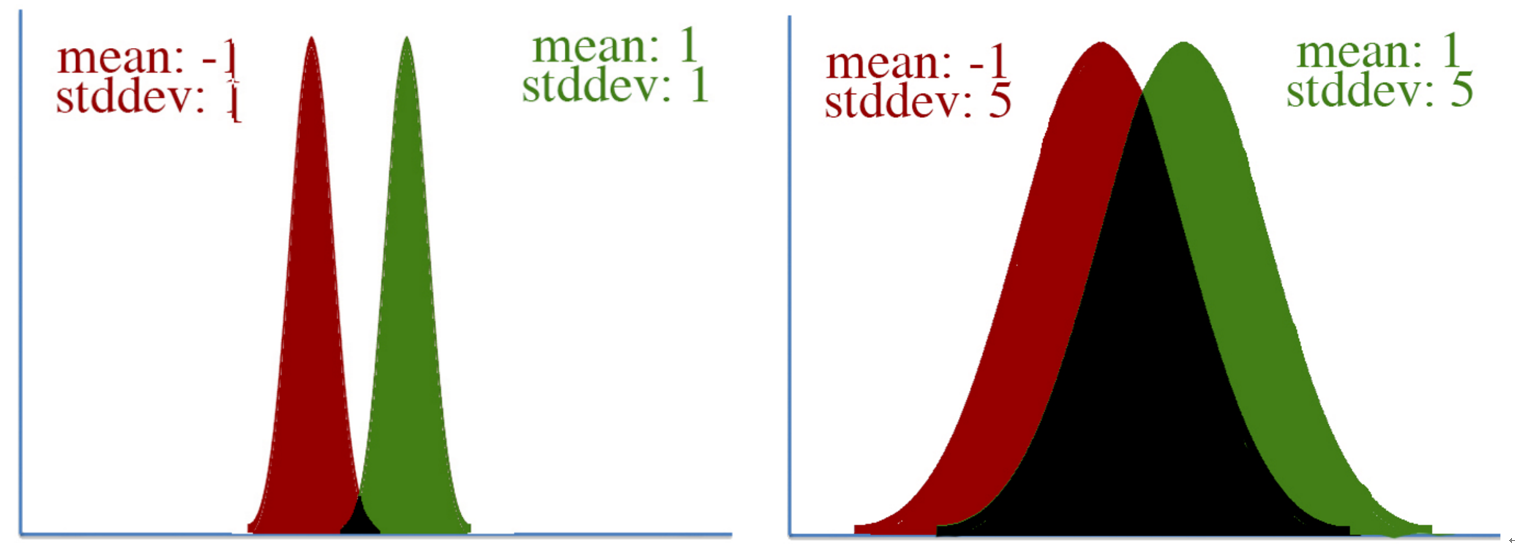
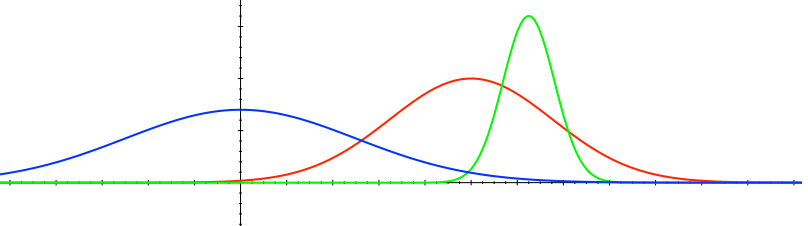
\[\bigtriangledown_\theta J(\theta) = E_{\tau \sim \pi'(\tau)} \left[\frac{\pi_\theta(\tau)}{\pi'(\tau)} \bigtriangledown_\theta log \pi_\theta(\tau) r(\tau)\right]\]但是Importance sampling的策略还是有两个bugs,第一,IS来带的方差是很大的!从图上来看,如果使用target是P,IS用Q来采样的话,在Q和P的相似性不高的时候,Q会采样出很多几乎无效的样本(他们的权重很小,图中的bar表示权重)。而且很难选中一个和P相似的Q。
从数学上来说:IS做的核心就是下式:
\[E_{x \sim P} [ f(x)] = E_{x \sim Q}\left[ \frac{P(x)}{Q(x)}f(x) \right]\]但是,它的方差就很恐怖了
\[Var\left(\frac{P(x)}{Q(x)}f(x)\right)=E_{x \sim Q} \left[ (\frac{P(x)}{Q(x)}f(x))^2 \right] - E_{x \sim Q} \left[ \frac{P(x)}{Q(x)}f(x) \right]^2\\ = \int Q(x) (\frac{P(x)}{Q(x)}f(x))^2 dx - (\int \frac{P(x)}{Q(x)}f(x) Q(x) dx)^2\\ =E_{x \sim P}\left[ \frac{P(x)}{Q(x)}f(x)^2 \right] - E_{x \sim P}\left[ f(x) \right]^2\]可以看到,一旦$\frac{P(x)}{Q(x)}$变大,那么这个方差是很大的。另外,IS的第二个bug在于Exploding or vanishing importance sampling weights。当使用IS的时候,policy gradient可以写成下式:
\[\bigtriangledown_\theta J(\theta) =E_{\tau \sim \pi'(\tau)} \left[ \sum_{t=1}^T \bigtriangledown_\theta log \pi_\theta(a_{i,t}\mid s_{i,t}) \left(\prod_{t'=1}^t \frac{\pi_\theta(a_t'\mid s_t')}{\pi'(a_t'\mid s_t')}\right) \left( \sum_{t‘=t}^T \gamma^{t'-t} r(s_{i,t'},a_{i,t'})\right)\right]\]问题就出在式子中的叠乘项。即使如果一条episode中,每个时刻Q和P只有一点点不一样,但是他们叠乘起来,这个数就会变得很畸形了。更不要说还可能是多个小于1的数叠乘会引发weights vanishing,多个大于1的数叠乘会引发weight exploding。总的来说,求解效果会很不稳定。
-
gradient的更新步长很难确定,这个问题算是老生常谈了。步长太大,会跨过最优点,甚至会在最优点附近震荡。步长太小的话,收敛速度就会很慢
-
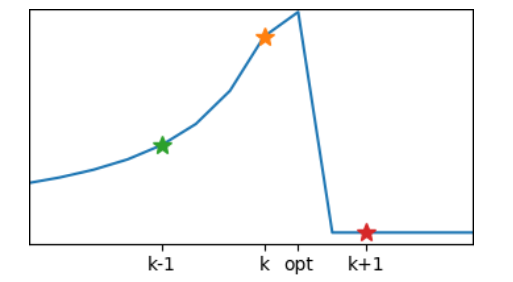
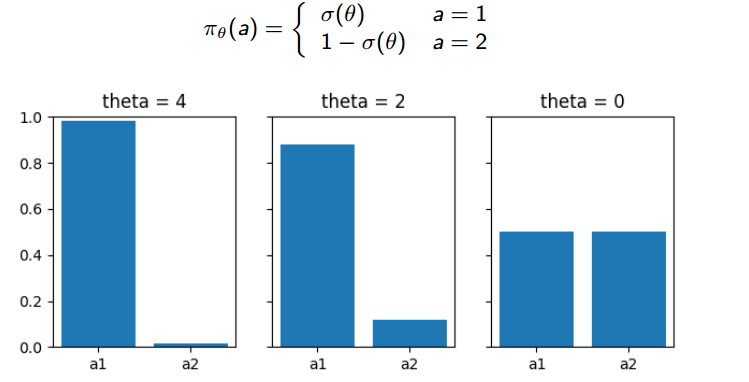
参数空间不等于policy 空间。感觉这算是一个收敛敏感性的问题。比如下图参数$\theta$发生等距的变化(从4, 再到2, 最后到0)但是在policy的变化却可能会很大。policy空间可能参数敏感的,在这种情况的优化policy,会很困难。
另一个例子是下图。当均值都从-1变到1的时候,很明显第一个图中的Gaussian变化更大。所以,不同的参数对分布的影响是不同的(比如均值和方差),传统的梯度下降是将每个参数的影响都视为一样的,因此,我们需要将参数对整体输出的影响考虑进去,并且根据它来scale每一个参数。
为了处理以上的问题,大牛们提出了很多高级的算法。本章就这些算法做一个总结。
13.1 Policy performance bounds
原policy gradient的方法的目标是最大化累计reward,
\[J(\pi_\theta)=E_{\tau \sim \pi_\theta(\tau)} \left[ \sum_{t=1} \gamma^{t-1} r(s_t,a_t) \right]\]这种方式不可避免的会有上面所提到的问题。大牛们转而去优化另一个目标:与其直接最大化,不如刻画一个相对的关系。这种相对关系建立在relative policy performance identity之上。所谓的relative policy performance identity是指,对于任意两个policy,一定满足下面的关系。下面等式的左边刻画两个policy在累计reward方面的差异
\[J(\pi')-J(\pi)=E_{\tau \sim \pi'} \left[ \sum_{t=0} \gamma^t A^\pi(s_{t},a_{t})\right]\]这个等式成立的原因在于下式。其中因为episode已经得到了,所以第二行中是$V(s_{t+1})$而不是$V(S_{t+1})$。倒数第二行到最后一行是通过展开后抵消得到的。最后一行中$E_{\tau \sim \pi’}[V^\pi(s_{0})]$,由于只依赖了$\pi’$的episode的初始状态,后面的trajectory都是通过$\pi$来走的,所以他就是$J(\pi)$。
\[J(\pi')-J(\pi)=E_{\tau \sim \pi'} \left[ \sum_{t=0} \gamma^t A^\pi(s_{t},a_{t})\right]\\ =E_{\tau \sim \pi'} \left[ \sum_{t=0} \gamma^t (r(s_t,a_t)+\gamma V^\pi(s_{t+1}) - V^\pi(s_t))\right]\\ =J(\pi') + E_{\tau \sim \pi'} \left[ \sum_{t=0} \gamma^{t+1} V^\pi(s_{t+1}) - \sum_{t=0} \gamma^t V^\pi(s_t)\right]\\ =J(\pi') + E_{\tau \sim \pi'} \left[ \sum_{t=1} \gamma^{t} V^\pi(s_{t+1}) - \sum_{t=0} \gamma^t V^\pi(s_t)\right]\\ =J(\pi') + E_{\tau \sim \pi'}[V^\pi(s_0)] =J(\pi')-J(\pi)\]如果$\pi’=\pi^{(k+1)},\pi=\pi^{(k)}$,那么relative policy performance identity就提供了一个不断迭代提上policy的方法,我们只需要最大化下式。但是,bug是我们需要从$\pi’$中进行采样才能计算后面的期望。
\[\pi^{(k+1)}=\arg\max_{\pi'} J(\pi')-J(\pi^{(k)})=E_{\tau \sim \pi'} \left[ \sum_{t=0} \gamma^t A^{\pi^{(k)}}(s_{t},a_{t})\right]\]我们得到episode,也就希望能采样得到$(s_{t},a_{t})$的序列。假设state来自一个于policy和dynamics共同作用的分布$d$(transition dynamics需要结合policy的action,才能确定下一时刻的state),那么接下来的action自然而然来源于policy。一般来说这里的分布$d$选为 discounted future state distribution $d^\pi$:
\[d^\pi(s)=(1-\gamma) \sum_{t=0}^\infty \gamma^t P(s_t=s \mid \pi)\]这个分布的定义方式和$TD(\lambda)$中的$\lambda$-return如出一辙。$d^\pi$刻画了访问state s的频率,但是随着时间的进行,每次访问的权重成指数衰减。这时候,relative policy performance identity就可以写成下式。其中,第三行是采用了importance sampling,第四行为了方便计算,采用$d^\pi$近似了$d^{\pi’}$,并且这种近似方法是有理论保证的。
\[J(\pi')-J(\pi)=E_{\tau \sim \pi'} \left[ \sum_{t=0} \gamma^t A^\pi(s_{t},a_{t})\right]\\ =\sum_{t=0} \sum_{s}\gamma^t P(s_t=s\mid \pi') \sum_{a} \pi'(a\mid s) A^\pi(s_{t},a_{t})\\ =\frac{1}{1-\gamma} E_{s \sim d^{\pi'}, a \sim \pi'} [A^\pi(s,a)] \\ =\frac{1}{1-\gamma} E_{s \sim d^{\pi'}, a \sim \pi} [ \frac{\pi'(a \mid s)}{\pi(a\mid s)} A^\pi(s,a)]\\ \approx \frac{1}{1-\gamma} E_{s \sim d^{\pi}, a \sim \pi} [ \frac{\pi'(a \mid s)}{\pi(a\mid s)} A^\pi(s,a)] = L_\pi(\pi')\\ =E_{\tau \sim \pi} \left[ \sum_{t=0} \gamma^t \frac{\pi'(a_t \mid s_t)}{\pi(a_t\mid s_t)} A^\pi(s_t,a_t) \right]\]所以目标转移成最大化$L_\pi(\pi’)$,并且这时候我们只需要对当前已知的policy采样来计算这个期望项。同时也避免了Exploding or vanishing importance sampling weights,因为这里的weights仅仅与当前时刻有关。理论上来说,这个近似方法同时也是有bound的,这就是relative policy performance bounds。这个bound说明,在$\pi$和$\pi’$很接近的时候,近似误差是很小的。
\[\mid J(\pi')-(J(\pi)+L_\pi(\pi')) \mid \leq C \sqrt{E_{s \sim d^\pi}[D_{KL}(\pi' \mid \mid \pi)[s]]}\\ D_{KL}(\pi' \mid \mid \pi)[s]=\sum_{a} \pi'(a\mid s)\log \frac{\pi'(a\mid s)}{\pi(a\mid s)}\]更有趣的是,$L_\pi(\pi’)$对policy $\pi’$的参数$\theta$的导数在$\theta_{k}$处的取值正好就是policy gradient,这里记当前policy为$\pi_{\theta_{k}}$:
\[\triangledown_\theta L_{\theta_k}(\theta) \mid_{\theta_k} = E_{\tau \sim \pi_{\theta_k}} \left[ \sum_{t=0} \gamma^t \frac{\triangledown_\theta \pi_\theta(a_t \mid s_t) \mid _{\theta_k}}{\pi_{\theta_k}(a_t \mid s_t)} A^{\pi_{\theta_k}}(s_t,a_t) \right] \\ =E_{\tau \sim \pi_{\theta_k}} \left[ \sum_{t=0} \gamma^t \triangledown_\theta\log \pi_\theta(a_t\mid s_t) \mid_{\theta_k} A^{\pi_{\theta_k}}(s_t,a_t) \right]\]13.2 Monotonic Improvement Theory
根据performance bound显示,上文直接最大化$L_\pi(\pi’)$,是不一定能保证policy improvement。因为他还与KL散度有关。所以正确的姿势应该是最大化下式:
\[\pi^{(k+1)}=\arg\max_{\pi'} L_{\pi^{(k)}}(\pi' )- C \sqrt{E_{s \sim d^{\pi^{(k)}}}[D_{KL}(\pi' \mid \mid \pi^{(k)})[s]]}\\ \mbox{因为:} J(\pi') - J(\pi) \geq L_\pi(\pi') - C\sqrt{E_{s \sim d^{\pi^{(k)}}}[D_{KL}(\pi' \mid \mid \pi^{(k)})[s]]}\]这个目标都可以从当前的policy中进行采样来估计,并且这个方法是一定能提升policy的。因为当$\pi’=\pi^{(k)}$的时候,KL散度那一项一定是等于0 的,$E_{\tau \sim \pi} \left[ \sum_{t=0} \gamma^t A^\pi(s_{t},a_{t}) \right]$也一定是等于0 的。所以当优化目标被最大化的时候,至少也是0了。也就说,最优值大于等于0,$J(\pi’)-J(\pi) \geq 最优值$。所以policy一定是提升的。
在实际使用中,参数$C$就很影响了,如果C太大,就要求policy一尘不动,这样就相对于SGD中的步长太小,收敛太慢。理论上的C值满足$C \propto (\frac{1}{1-\gamma})^2$,所以当$\gamma$接近1的时候,这个优化步长就相当小了。所以大牛们把原问题改成约束优化问题:
\[\pi^{(k+1)}=\arg\max_{\pi'} L_{\pi^{(k)}}(\pi' )\\ \mbox{s.t. }E_{s \sim d^{\pi^{(k)}}}[D_{KL}(\pi' \mid \mid \pi^{(k)})[s]] \leq \delta\]这种转换能保证KL散度的误差在一定范围内,这个范围叫做信赖域(trust region),并且大佬们证明这个方式也能保证在 worst case下有所提升。这个优化问题就是后面要介绍的算法的理论基础。它使用当前的policy来采样,以计算L和E,从而得到improved policy;并且这里是直接优化的policy $\pi$,这就和policy的参数空间的畸形与否,关系不大了。
13.3 Advanced Policy Gradient Algorithms
13.3.1 Natural Policy Gradient (NPG)
NPG主要是为了处理parameters space和policy space的in-covariant而提出的。他最后的下降方向是$H^{-1}g$,其中$g$是梯度,$H$是一个Fisher Information matrix。NPG通过使用H来scale parameter,达到covariant 的目的(也就是前文提到的PG的第三个问题)。当$H=I$的时候,NPG就是普通的PG下降方向了。
给定参数$\theta$和数据$X$下的似然函数$L(X;\theta )$,Fisher Information Matrix 定义为Score function的二阶矩 $E[S(X;\theta)^2]$。其中score function $S(X; \theta) $是 $\log L(X;\theta)$对参数$\theta$的一阶导。
Under specific regularity conditions,fisher information刻画了最大似然估计的方差,等同于log 似然的负二阶导数的期望 $-E[\frac{\partial^2 \log L(X;\theta)}{\partial \theta^2}]$.。Fisher Information反映了我们对参数估计的准确度,它越大,对参数估计的准确度越高,即代表了越多的信息。
NPG优化细节是通过用泰勒展开来近似原始目标方程。
\[\max_{\pi'} L_{\pi^{(k)}}(\pi' )\\ \mbox{s.t. }D_{KL}(\pi' \mid \mid \pi^{(k)})\leq \delta\]其中L被近似到一阶,KL被近似到二阶,两者都是在$\theta=\theta_{k}$的地方进行展开($\theta$是policy的参数),下面把他们写成参数的形式进行近似:
\[L_{\theta_k}(\theta) \approx L_{\theta_k}(\theta_k) + g^T (\theta - \theta_k) , \mbox{ } g=\triangledown_\theta L_{\theta_k}(\theta) \mid_{\theta_k}\\ D_{KL}(\theta \mid \mid \theta_k) \approx \frac{1}{2} (\theta-\theta_k)^T H (\theta-\theta_k), \mbox{ } H= \triangledown^2_\theta D_{KL}(\theta \mid \mid \theta_k)\mid_{\theta_k}\]注意,对于KL散度来说,原始的近似是长这样的:
\[D_{KL}(\theta \mid \mid \theta_k) \approx D_{KL}(\theta_k \mid \mid \theta_k) + g_{KL}^T (\theta-\theta_k)+ \frac{1}{2} (\theta-\theta_k)^T H (\theta-\theta_k)\]对于右端的第一项显然为0,对于第二项,他其实也是为0的:
\[D_{KL}(\theta \mid \mid \theta_k) = \int \pi_\theta(s) \frac{\log \pi_\theta(s)}{\log \pi_{\theta_k}(s)} ds\\ \triangledown_\theta D_{KL}(\theta \mid \mid \theta_k) = \int \triangledown [ \pi_\theta(s) \log \pi_\theta(s)] ds - \int \triangledown \pi_\theta(s) \log \pi_{\theta_k}(s) ds\\ = \int \triangledown \pi_\theta(s)(1+\log \pi_\theta(s) ) ds - \int \triangledown \pi_\theta(s) \log \pi_{\theta_k}(s) ds\\ = \int \triangledown \pi_\theta(s)(1+\log \pi_\theta(s) - \log \pi_{\theta_k}(s) )ds \\ = \int \triangledown \pi_\theta(s)(\log \pi_\theta(s) - \log \pi_{\theta_k}(s) )ds\\ \mbox{因此:}g_{KL}^T=\triangledown_\theta D_{KL}(\theta \mid \mid \theta_k)\mid_{\theta_k} =0\]式子中,那个1的去掉方法是这个:
\[\int \triangledown \pi_\theta(s) ds = \triangledown \int \pi_\theta(s) ds = \triangledown 1 = 0\]所以,对于NPG来说,他的优化目标变成了下面的样子:
\[\theta_{k+1} = \arg \max_\theta g^T (\theta - \theta_k) \\ \mbox{s.t. } \frac{1}{2} (\theta - \theta_k)^T H (\theta - \theta_k) \leq \delta\]这个是个QCQP问题,可以用KKT来解他。先写出他的拉格朗日式子(原始优化是求的max,注意加个负号让他变成min)
\[L= g^T (\theta_k - \theta) - \lambda \left( \frac{1}{2} (\theta - \theta_k)^T H (\theta - \theta_k) - \delta \right)\]我们可以得到他的KKT条件(实际上根据前两条件就可以求解了):
- stationarity condition: $\frac{\partial L}{\partial \theta}=0 \rightarrow \theta=\theta_{k}+\frac{1}{\lambda} H^{-1}g$
- complementary condition: $\lambda \left( \frac{1}{2} (\theta - \theta_{k})^T H (\theta - \theta_{k}) - \delta \right)=0$
- primal & dual feasibility: 略
由于不等式约束的拉格朗日变量$\lambda>0$,所以得到:
\[\left\{\begin{matrix} \theta=\theta_{k}+\frac{1}{\lambda} H^{-1}g \\ (\theta - \theta_{k})^T H (\theta - \theta_{k}) = 2\delta \end{matrix}\right.\]我们可以把第一项导入到第二项中,求出$\lambda$,然后得到NPG的最后更新公式:
\[\theta=\theta_{k}+ \sqrt{\frac{2\delta}{g^TH^{-1}g}} H^{-1}g\]最后NPG的伪代码为下图。另外NPG要计算一个H的逆,这个复杂度很高很高。这个问题有其他的改进策略,比如Truncated NPG。
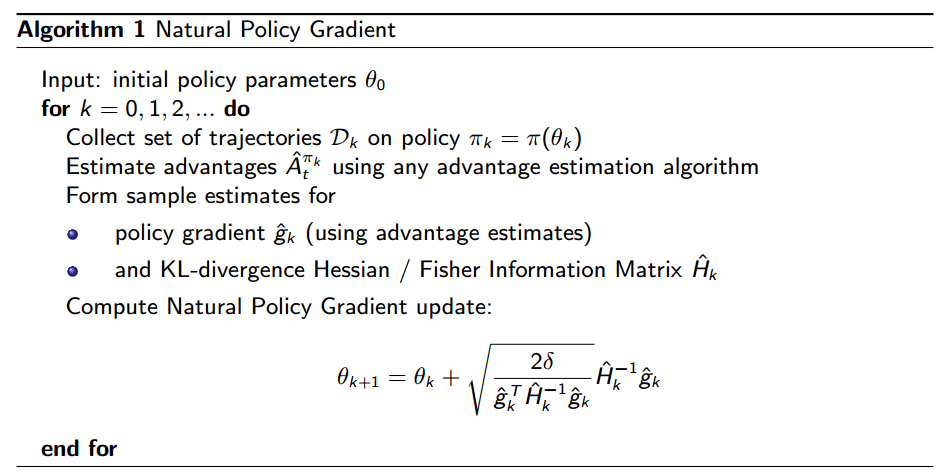
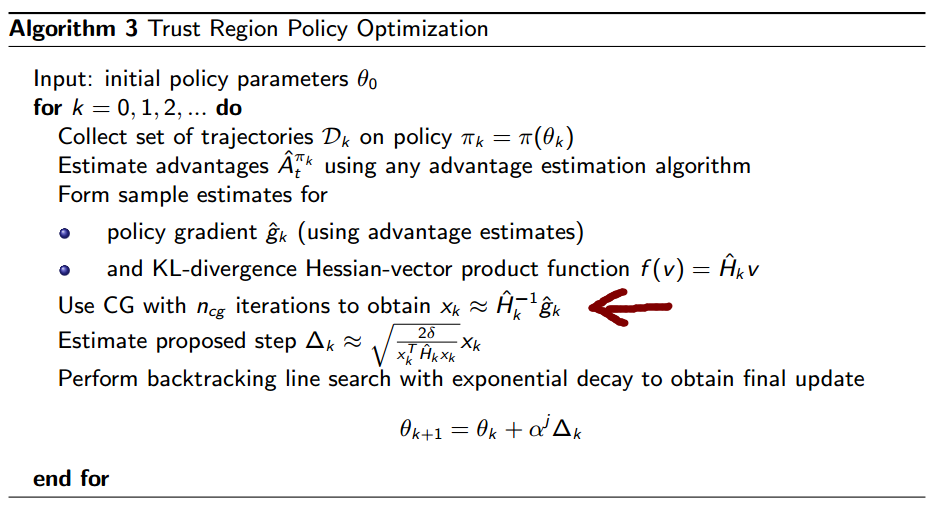
13.3.2 Trust Region Policy Optimization (TRPO)
NPG算法很厉害,但是在实际使用中有两个问题:
- $\delta$的选择
- 泰勒展开近似KL散度的时候,原始约束可能会被破坏,不准确。
这两个问题都可以通过步长选择的方式来避免。这里步长是$s=\sqrt{\frac{2\delta}{g^TH^{-1}g}}$。如果步长太大,导致不满足原始约束( $D_{KL}(\theta \mid \mid \theta_{k}) > \delta $),或者保证不了policy improvement ($L_{\theta_{k}}(\theta) < 0$),那么就缩小步长。步长成指数衰减,衰减因子为$\alpha\in (0,1)$。伪代码如下:
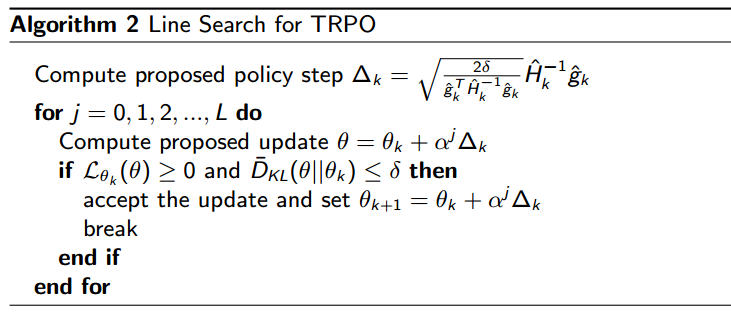
在上面的算法中,结合这个步长方法就是TRPO了。图中箭头标注的部分是用来计算$H$的逆矩阵的,类似于Truncated NPG的策略,采用Conjugate Gradient (CG) 算法。
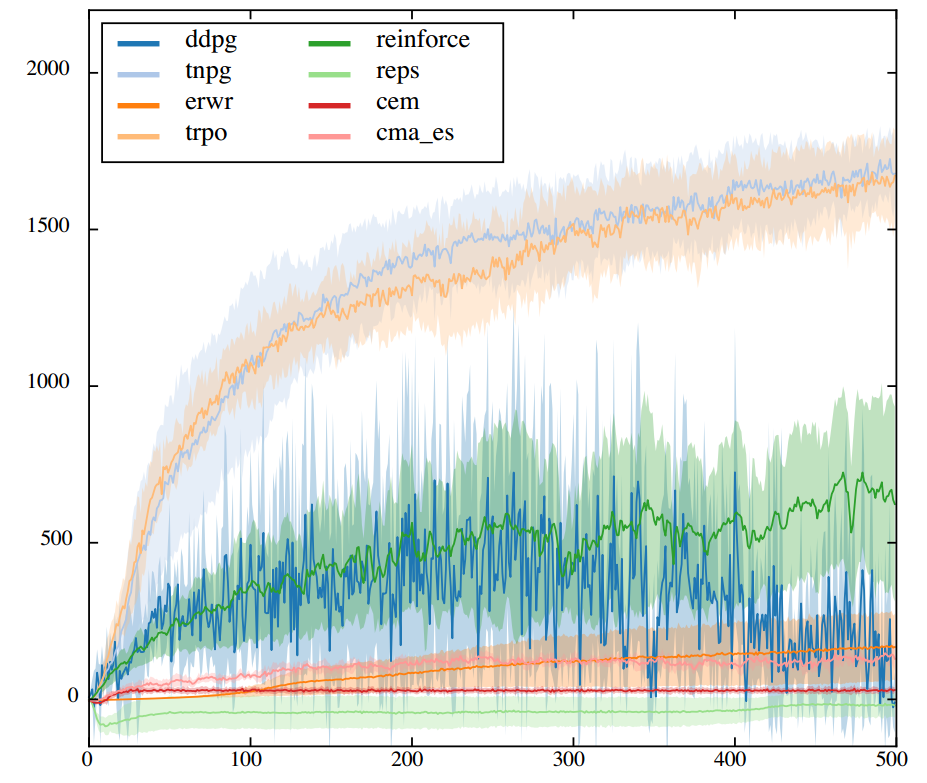
下图给出了很多算法的效果,y轴是平均reward。其中Truncated NPG和TRPO算法的性能确实是最好的,不仅score高,方程还小
13.3.3 Proximal Policy Optimization (PPO)
PPO算法可以进一步的优化计算量,PPO并不会去计算natural gradient,所以不会去计算$H^{-1}$。他会直接去计算一个带有截断效应的代理函数(clipped surrogate function)。虽然PPO没有啥理论依据,但是他的效果是很好的。PPO有两种实现:
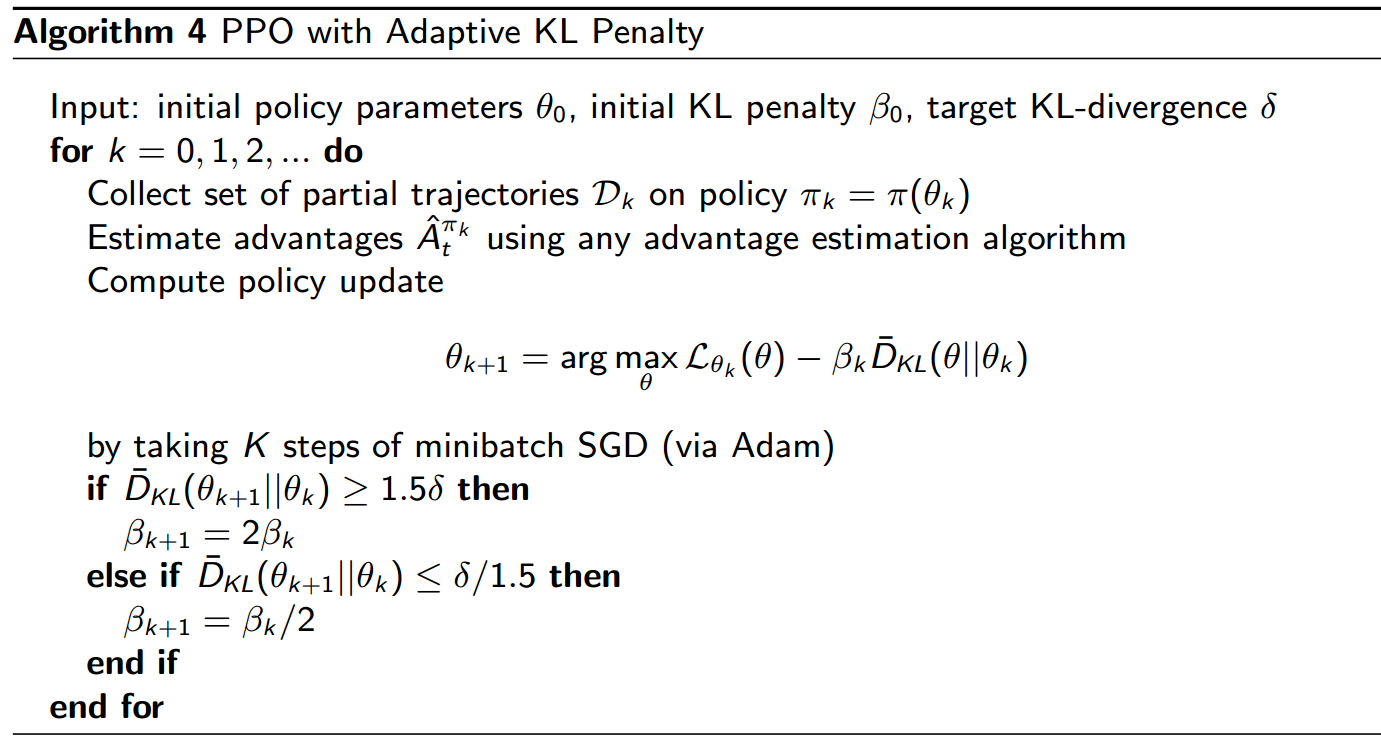
- Adaptive KL:他把原始的无约束优化问题中的$C$,变成了一个与迭代次数有关的书$\beta_{k}$。每次迭代会修正这个值
-
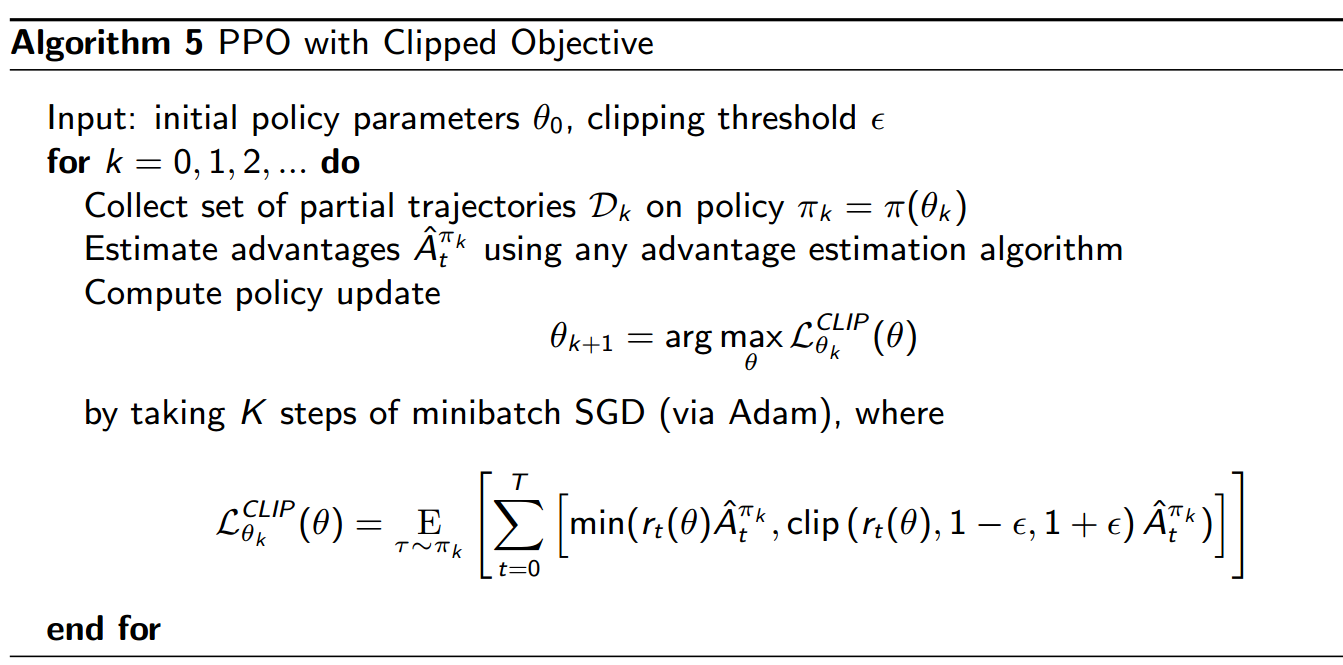
Clipped function:这时候的优化方程也是无约束的,用截断函数clip来替换了,$clip(A,B,C)$是说,如果A超过了最小值B,则等于B;超过最大值C,就取C,否则取A。另外$r_{t}(\theta)=\frac{\pi_\theta(a_{t} \mid s_{t})}{\pi_{\theta_{k}}(a_{t}\mid s_{t})}$,通常$\epsilon=0.2$
\[\max_{\theta} L_{\theta_{k}} ^{Clip}(\theta)=E_{\tau \sim \pi_k} \left[\sum_{t=0}^T[\min(r_t(\theta)A_t^{\pi_k}, clip(r_t(\theta), 1-\epsilon, 1+\epsilon)A_t^{\pi_k})] \right]\\ \theta_{k+1} = \arg\max_{\theta} L_{\theta_{k}} ^{Clip}(\theta)\]
对于第一个算法,他的伪代码如下:
第二种:
14. Exploration and Exploitation
RL其中一个bug就在于搜索空间太大,难以找到全局最优解。这个问题可以等同于是探索(exploration)和利用(exploitation)之间的矛盾:到底是要根据已有的信息,做出决策;还是去探索未知,收集更多信息。探索未知,可能得不到一个好的(long-term或者short-term)reward,但是不去做,又没法知道。就好比,如果做action a1,可能得到10份,但是action a2的不确定性很高,它可能会带来5分到20分之间的一个reward,那么去不去做a2呢?这要求我们有一个好的探索策略,知道什么时候该去explore,什么时候该去exploit。
在之前的几个章节里,多多少少已经用到了exploration。比如$\epsilon-$greedy,MCTS,甚至off-policy的思想也有一点点exploration的意思(用其他不准确的policy来采样动作,有引入噪声和扰动,起到一点点exploration的效果)。这个问题发展至今,有很多的算法被相继提出,包括:
- Naive/Greedy Exploration
- Upper Confidence Bound
- Posterior Sampling / Probability Matching
- Information State Search
- Information Gain based
这些方法或多或少都是建立在multi-armed bandits问题之上。首先来看这个基础
14.1 Multi-Armed Bandits
Bandits问题就是有一台赌博机,每次pull arm的时候,他会给一个reward。Multi-Armed Bandits就是有多台这样的赌博机,每一台有一定的概率$P(r\mid a_{i})$给一个reward,但是玩家并不知道任何一台赌博机出现reward大小的概率分布,玩家需要每次选择一个机器,然后pull arm,得到reward
这个网页是一个类似的游戏。你需要在多种药中,每次选择一种,给病人服用。病人可能会治愈,可能会死亡。你需要根据病人的反馈,决定下一次要不要给下一个病人换药。当然,你的目的在于让更多的病人被治愈。
Multi-armed bandits可以看做是一个特殊的MDP,他没有状态空间,并且action space有m个动作,对应m个bandits。第$t$时刻,动作$a_{t}$表示去拉某一个机器的arm,每次动作之后会有一个反馈$r_{t}=R^{a_{t}}$。所以,我们的目标是最大化累计reward $\sum_{t}r_{t}$。这里没有discount,是因为Multi-armed bandits的episode长度为1,即,拉完一个arm之后,这个episode就结束了。
如果,一开始就知道每台机器的详细情况,出现大值reward的概率等等(这在实际情况中是很不现实的),那么就可以每次都做出一个最优的动作$a^\star$。因此,它对应的最优V函数表示为下式(注意,由于bandits问题是一个没有状态的MDP,所有Q函数里把state给删掉了)
\[V^\star = Q(a^\star)=\max_{a} Q(a)\\ Q(a)=E[r\mid a]\]我们要做的,就是尽可能的去达到最优值,减小我们的策略与最优之间,所得到reward的差异,这个差异称为regret,它表示后悔没有选最优的动作。(Multi-armed bandits实际上是online learning中的一个分支,online learning要做的事也是最小化total regret)
\[Regret=E\left[ \sum_{\tau}^t V^\star - Q(a_\tau)\right]\]对于Multi-armed bandits问题来说,这个regret的形式可以进一步的简化。令$N_{t}(a)$表示选中动作a的次数,$\triangle_{a}=V^\star-Q(a)$表示动作a与最优动作之间的差距,那么,regret可以简化成下式。
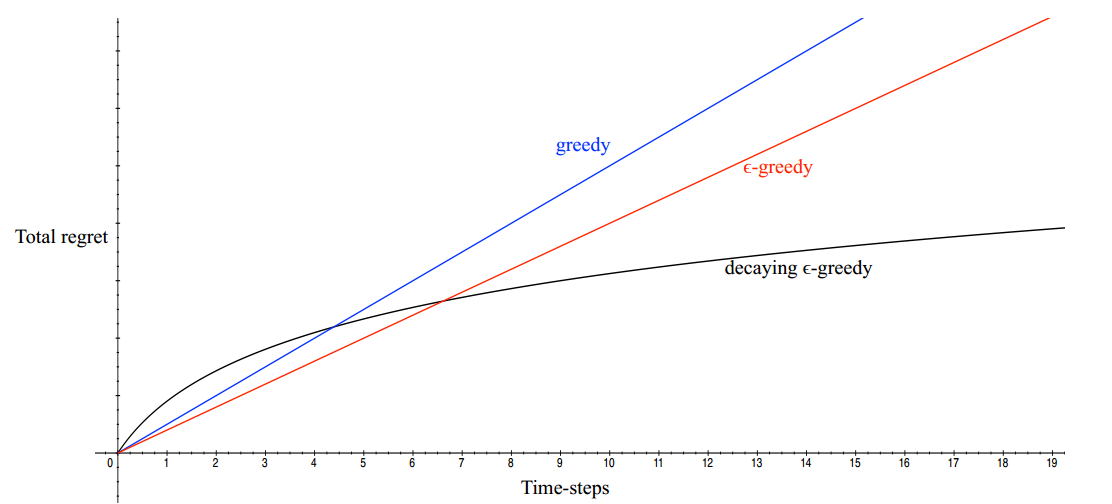
\[Regret=E\left[ \sum_{\tau}^t V^\star - Q(a_\tau)\right]=\sum_a E[N_t(a)]\triangle_a\]这个式子的含义在于:最小化regret就是要减少那种效果很差的动作的发生次数。我们希望的效果,随着pull arm的次数增加,我们能掌握更多信息,犯错的次数越来越少(如图中的黑线,随着实验次数增加,regret的总量有了上界),我们不能接受的是一直在犯错(图中蓝线和红线)。 不幸的是,在不知道$V^\star$的情况下,还没有算法能达到黑线的效果,我们只能不断的接近黑线,让regret有一个稍差一些的上界。这个上界一般称为Regret bound,它是衡量online learning method的一个很重要的指标。(图中的黑线代表的bound是sublinear的)
Multi-armed bandits作为很多问题的基础,是因为它具有很好的理论基础。随着问题背景的复杂度增加,理论上也渐渐失去保证了,exploration的应用难度也渐渐加大。

14.2 Naive/Greedy Exploration
14.2.1 Greedy
一种最直接的探索方法就是贪心策略:每次选择当前“准确率”高的机器。我们可以去学习一个动作的好坏$\widehat{Q}_{t}(a)$,比如使用MC方法来计算平均reward(当然,也可以增量的进行更新)
\[\widehat{Q}_t(a)=\frac{1}{N_t(a)} \sum_{t=1}^T r_t \mathbf{1}(a_t=a)\]然后,每次贪心的进行选择$a_{t}=\arg\max \widehat{Q}_{t}(a)$。咋一看,感觉还可以。但是如果一开始选到了一个次优的,就会一直贪心的选同一个,而不去尝试其他action。所以,greedy的regret是线性的,每次选择都会有错(因为太贪心了)。
14.2.2 $\epsilon-$greedy & Initialization
一个缓解贪心策略的方法就是$\epsilon-$greedy。这种方法会以一定的概率选择贪心action,以一定概率随机的选择其他action。也就是说,它也有一定概率陷入greedy策略的窘地,但是有小概率可以逃脱。在实际使用的时候,还有一个小的trick:在初始化模型的时候,将$\widehat{Q}(a)$设置成一个很大的值,$N(a)$也设置成很大的值。这么做的想法是:一个action是坏的,只有当证明他真的是坏的,并且,他会鼓励在一开始的时候,尽可能的多做探索。因为当初始值很大的时候,如果一个action a带来的reward很小,那么$\widehat{Q}(a)$就会降低。一旦它降低,那么下一次我们就会去尝试其他action,因为他们的$\widehat{Q}(a’)$可能更大。最后,虽然这种方法的效果会比纯贪心的方法好,但是他的regret也是线性的。
那么,基于贪心的方法能达到sublinear么?如果已知每一次的最优动作,那么基于贪心的方法是可以达到sub-linear的效果。这时候会要求$\epsilon$的值是动态改变的。(如果不知道最优动作,$\triangle_{a}$是计算不出来的)
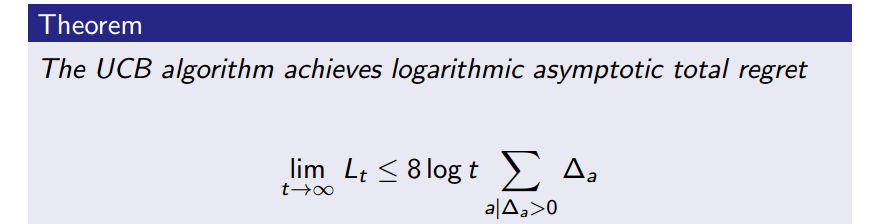
\[\epsilon_t=\min(1, \frac{c\mid A \mid }{d^2t})\\ d=\min_{a \mid \triangle_a > 0} \triangle_i\\ c>0\]这时候,算法的regret bound是sublinear的。但是,以上所有的方法,要让他们收敛到bound上,都需要很多次的实验,所以,在有限制次数的情况下,这些都是没啥理论保证的。
14.3 Upper Confidence Bound
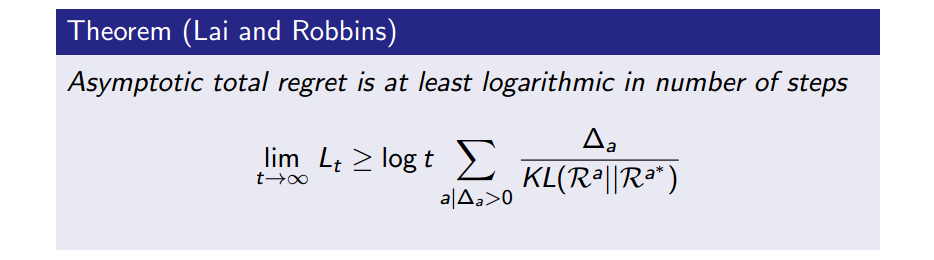
Upper Confidence Bound,简称UCB。这个方法在介绍MCTS的时候用提到了,他在选择action的时候,还可靠了action的不确定性(带来10分的action V.S. 可能带来5到20分的action)。如下图所示,通过很多次的实验,我们计算出三个机器给的reward分布。一号机$Q(a_{1})$的均值大概在$2.5$,并且方差很小,也就说,选择一号机很大可能他会给出2.5的reward。同理二号机是2,三号机1.5。这时候应该如何选择呢?如果选择1号,那么大概率是2.5分,但是从2号或者3号得到大于2.5分的reward的概率是不小的,尤其是3号,他的不确定性最大,得高分的可能性也最大。UCB提供了一个综合考虑的策略,他认为不确定性越大的action,越应该去探索,有可能那会是更好的action。
随着实验的增加,我们就会越来越置信:
所以,UCB假设每一个动作都有一个置信度$U_{t}(a)$上限,这个置信度和观察次数有关。对于一个动作的观察次数$N_{t}(a)$越大,置信度应该越小。我们当前的估计值$\widehat{Q_{t}}(a)$和置信度$U_{t}(a)$一起决定了真实值的上界。即,$Q_{t}(a)\leq \widehat{Q_{t}}(a)+U_{t}(a)$。因此,在选择action的时候,需要一起考虑。通过最大化上界,选择出最有可能的动作。
\[a_t=\arg\max_a \widehat{Q}_t(a) + U_t(a)\]根据Hoeffding不等式,他给出了随机变量的和与其期望值偏差的概率上限
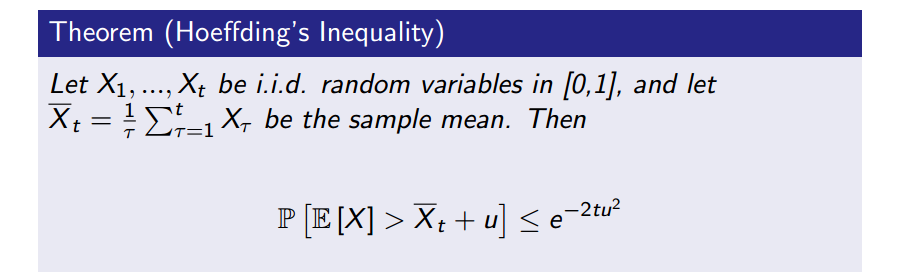
UCB可以套用这个不等式来计算$U_{t}(a)$。套用下来就是
\[P\left(Q_t(a)>\widehat{Q}_t(a)+U_t(a)\right) \leq e^{-2N_t(a)U_t(a)^2}\]假如我们希望这个bound不超过p(比如p=5%),那么根据$p=e^{-2N_{t}(a)U_{t}(a)^2}$,可以得到
\[U_t(a)=\sqrt{\frac{-\log p}{2N_t(a)}}\]回想,这里的置信度和观察次数是有关的。对于一个动作的观察次数$N_{t}(a)$越大,置信度应该越小。所以,我们希望概率p是t的函数,比如$p=t^{-4}$,这时候有:
\[U_t(a)=\sqrt{\frac{2\log t}{N_t(a)}}\\ a_t=\arg\max_a \widehat{Q}_t(a) + \sqrt{\frac{2\log t}{N_t(a)}}\]这个式子就很友善了,是在MCTS中访问子节点时候用到的指标。不过,在MCTS中,$N_{t}(a)$表示该节点被访问的次数,t表示这个节点的父节点被访问的次数。实际上$U_{t}(a)$的形式并不是局限于上面的这种形式,其他论文里也有人采用别的形式,比如:
\[U_t(a)=\sqrt{\frac{1}{N_t(a)}} \mbox{ 或者 } U_t(a)=\frac{1}{N_t(a)}\]另外,UCB也是一个sublinear的方法。但是UCB在MDPs上的应用是有一点点bug的。UCB本身是用于bandits问题,而bandits的episode长度为1,所以,UCB没有考虑在MDPs中一条episode的数据之间的相互依赖。并且,处理一条episode的过程中,policy也可能是在更新的,但是UCB的$U_{t}(a)$在一条episode上是不变的。当然,这个问题很难处理,所以,UCB还是应用挺广的。
14.4 Posterior Sampling / Probability Matching
Posterior Sampling是一种以概率选择的方法,它在历史实验的情况下,根据action是最优action的概率来进行选择
\[\pi(a\mid h_t)=P(Q(a) > Q(a'), \forall a' \neq a \mid h_t)\]这是一种Bayesian Bandits,在各个bandits的reward 分布是有先验的,所以,$\pi(a \mid h_{t})$是一个在历史实验数据$h_{t}$条件下的后验概率。举个栗子,假设bandits的reward的似然服从高斯分布$R_{a}(r)=N(r; \mu_{a}, \sigma_{a}^2)$,先验也是高斯,并且各个bandits之间是独立的(如下图)。那么,就可以求出均值和方差的后验分布,用后验值来选择action。比如可以用下式:
\[a_t= \arg\max \mu_a + \frac{c \sigma_a}{\sqrt{N_t(a)}}\]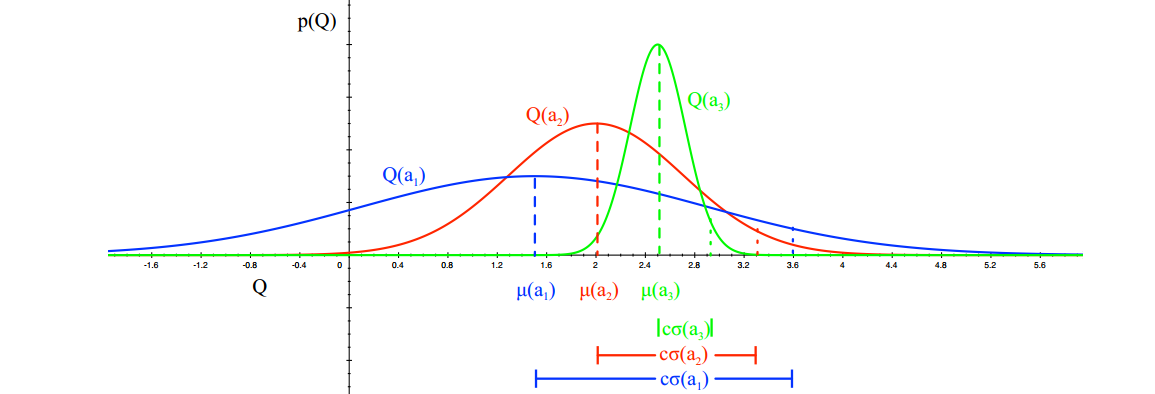
上面的解法的后背是采用了Thompson Sampling的思想。Thompson Sampling是用来求解probability matching的方法:依概率随机选择动作,而这里的概率是指该动作是最优的动作的概率
\[\pi(a\mid h_t)=P(Q(a) > Q(a'), \forall a' \neq a \mid h_t)\\ =E_{R \mid h_t} \left[ \mathbf{1}(a=\arg\max_a Q(a)) \right]\]详细的说,他的求解过程就是:
- 计算后验$P$(比如,上面的例子,我们算到了均值和方差的后验分布)
- 从后验 $P$中采样出reward分布(从每一个bandit的后验采样出一个均值和方差,这样每个bandits上的reward分布也就确定了)
- 选择动作 $a_{t}=\arg\max_{a} Q(a)$(比如采用UCB的方法来计算)
- 根据选择的结果,更新后验分布$P$
14.5 Information State Search
Information State Search是一个新的视角。他把bandits转变成了连续决策的过程。原始bandits是没有state的,这里给它加了一个Information state。所谓的information state $s$是指带一个历史信息的总和,即$s_{t}=f(h_{t})$。比如当$t=0$的时候,$s_{0}$表示一次都没有pull;如果$t=1$的时候,以一定的选择概率$P$,拉了一号,那么$s_{1}$就表示一号拉了一次,其他0次。所以这个又变成了一个MDP了:${S,A,P,R,\gamma}$
既然变成了传统的MDPs问题,我们就可以用model-free的方法(比如Q-learning)求出Q,或者用model-based RL的方法遍历出所有的情况,就像AlphaGo的MCTS一样。比如下图,一共有两个bandits,他们的reward有一定的先验分布,如果这时选择第一台机器(对应左分支),他可能给一个好的或者坏的reward,根据不同的reward,就可以更新第一台机器的reward分布,以此类推。这实际上就是一个Planning,当planning了很久之后(如果次数有限,那么就做有限次的Planning就好),就大概可以得到两台bandits的reward分布究竟长什么样子,那么也就可以做出好的选择。
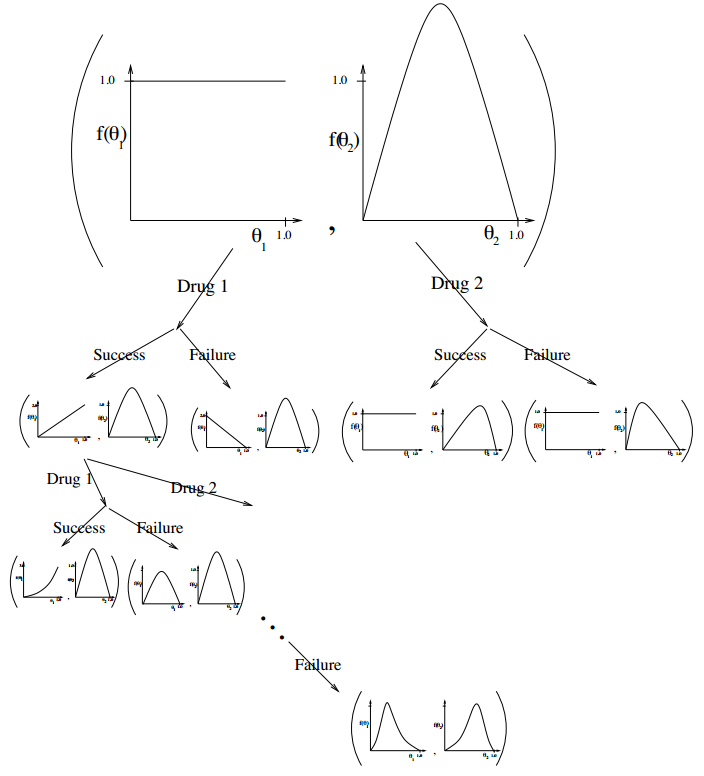
如果上面的例子中的先验选择Beta分布 $Beta(\alpha_{a},\beta_{a}) $,其中$\alpha$表示坏reward,$\beta$表示好reward。那么他们的后验变化就可以表示成下图(暂时不动矩阵中的第二行有啥用。。)
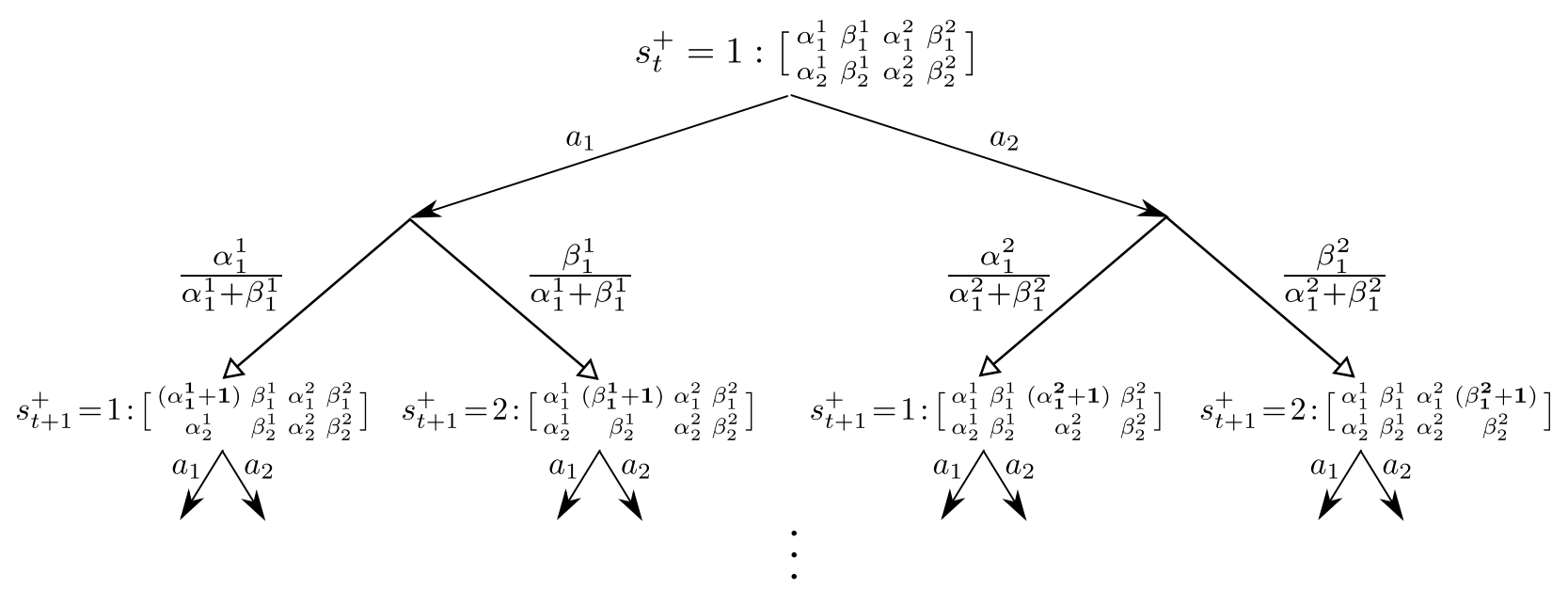
这里具体的求解可以使用Gittins indices,也叫Bayes-Adaptive RL,他也是一种基于动态规划的算法。
14.6 Information Gain
基于信息增益的方法直接度量了一个action所带来的信息收益,以减小bandit的reward分布的不确定性。
\[IG(z,y\mid a) = E_y\left[ H(P(z))-H(P(z)\mid y) \mid a \right]\]这里的y表示reward $r_{a}$,z表示bandits的reward分布的参数$\theta_{a}$。这个式子的含义是:根据做出action a,我们能收到一定的reward,那么,这个reward能降低 当前a所作用的bandits上参数的多少不确定性,从而来衡量动作a的收益有多大。因此,我们可以这样选动作:希望找一个信息增益大的,并且与最优动作之间的差异小的动作。(这里假设了已知最优动作,所以才能计算$\triangle_{t}(a)$)
\[\arg\min_a \frac{\triangle_t(a)^2}{IG(\theta_a, r_a\mid a)}\]14.7 RL in Action
Multi-armed bandits相比于RL来说,问题简单了不少。本部分主要就RL的exploration方法做一个简述。总的来说,上面提到的方法在RL中都可以应用。比如基于Naive method或者UCB的方法,但首先要解决的问题是怎么对某个状态的访问次数进行计数。这个问题在连续action space下,用常规的方法是“数”不过来的。
14.7.1 How to count $N_{t}(a)$ or $N_{t}(s)$
对于离散空间下的action/state还可以单纯的通过计数的方式统计,但是在连续空间下,同一个action/state重复出现的概率是等于0的,但是不同的action/state之间可能是很相似的。对于连续空间,我们可以使用deep network来学习出pseudo-count,记为$P_\theta(s)$或者$P_\theta(s,a)$。这样,相似的输入,我们可以保证有相似输出(count)。
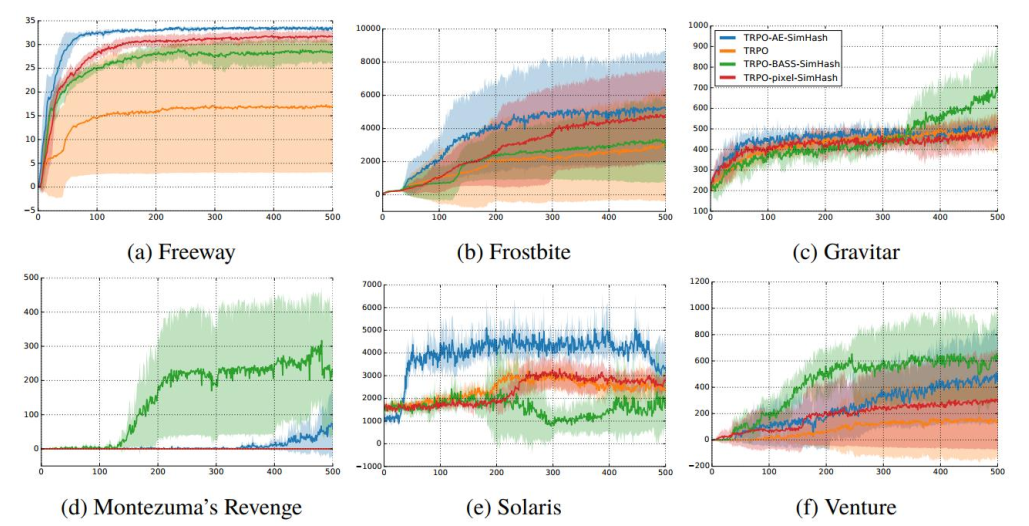
一种方案是将连续转变成离散,在新的离散空间来count。这种手段比较多,比如聚类,Hash等等。我们首先得到state的feature,然后通过聚类或者Hash的方法把它映射到簇或者partition bin中。这种方法很粗糙,而且和离散空间的大小有关系。但是有用Hash来做的文献表明,效果是挺好的,如下图所示。(聚类的方法不知道有没有文献支持)
还有一种不同的思路:如果,在某个时刻,$P(s)$是等于下面第一个式子,在下时刻又观察到s的时候,我们用第二个式子表示count的ratio。其中n是总的实验次数,$N(s)$表示n中观察到状态s的次数
\[P_{\theta}(s)=\frac{N(s)}{n}\\ P_{\theta'}(s)=\frac{N(s)+1}{n+1}\]有了这两个式子,我们就可以反推出$N(s)$:
\[N(s)=nP_\theta(s) = \frac{1-P_{\theta'}(s)}{P_{\theta'}(s)-P_\theta(s)}P_\theta(s)^2\]所以,我们可以得到计数的一个伪代码:
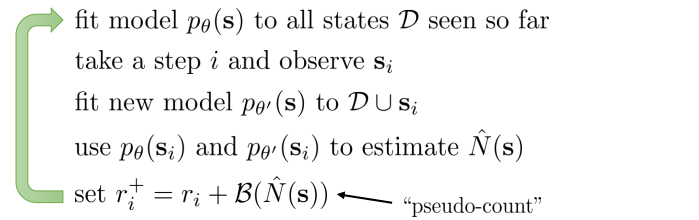
简单的说,就是找到$P_\theta(s)$,计算出$N(s)$就ok了。问题是怎么计算$P_\theta(s)$?其中一个方法是通过构建一个分类器来实现density value的输出。
EX2: Exploration with Exemplar Models for Deep Reinforcement Learning
他的基本假设是:如果一个状态是比较陌生的,那么他会很容易被分类器与之前的状态分开。所以,首先以之前所有的state作为负类,以当前state作为一个正类,训练一个分类器。那么以下面这个分类的难易程度来近似$P_\theta(s)$。其中$D_{s}(s)$表示关于状态s的分类器,把状态s分成状态s的概率。(是的,我没有打错字)
\[P_\theta(s) = \frac{1-D_s(s)}{D_s(s)}\]论文说,当状态s已经在以前的某个时刻经历过,那么,最优分类器$D_{s}(s)$其实不等于1,而是等于$D_{s}(s)=\frac{1}{1+P(s)}$,所以才会以上面的式子来近似计算$P_\theta(s)$
14.7.2 UCB in RL
UCB的方法基本和所有的RL算法都很兼容,这时候只需要将reward设置为$r(s,a)+ e \sqrt{\frac{2\log t}{N(a)} }$。这里$e$是两个部分的融合权重,怎么设置就需要调参咯
14.7.3 Posterior sampling in RL
posterior sample与RL的结合方式是通过Off-policy。比如在Q-learning,我们其实并不关心要基于那个Q函数来求max,选action。所以可以吧这个Q当做是一个从posterior 中采样出来的样本。这么做
14.7.4 Naive Method in RL
- 使用$\epsilon-$greedy的方法,同时结合那个特殊的初始化方法,然后就可以正常的跑Q-learning, sarsa, MC等等model-free RL方法。
- 或者采用model-based方法,在学习reward和transition的时候,初始化每个状态的reward都最大。然后随着学习的进行,用table lookup的方法统计和学习真正的reward。这个方法和有特殊初始化的$\epsilon-$greedy方法如出一辙,该算法叫RMax