Why Sampling
在大多机器学习的任务中,我们对模型参数$\theta$的求解对象都是它的后验分布$P(\theta \mid X) \propto P(X\mid \theta )P(\theta)$。如果我们幸运的知道,先验和似然是共轭的关系,后验就和先验服从同一类分布形式,那么我们可以简化计算,进一步得到参数后验的表达式$P(\theta \mid X)$。实际上往往是不共轭的,虽然我们知道参数的先验$P(\theta)$和似然$P(X\mid \theta )$的表达式,但是后验$P(\theta \mid X) \propto P(X\mid \theta )P(\theta)$往往是一种形式很复杂的分布,难以求出参数的均值方差等统计特性。所以我们需要Sampling,从某个分布中来抽样,得到一些样本,然后根据这些样本,我们就可以得到对该分布特性的估计。比如,Sampling可以用做对概率图模型上的(基于粒子的)近似推断
关于采样方法,个人不成熟的分为下面两种:
-
两次采样数据之间相互独立
比如:CDF Sampling, Reject Sampling, Adaptive Rejection Sampling, Importance Sampling
-
两次采样数据之间不独立
比如:MCMC, Slice Sampling
1. 独立数据采样
1.1 CDF Sampling
累积分布函数(Cumulative Distribution Function,CDF)是一个随机变量X的概率分布相对应的不减函数,是概率密度函数的积分,记为$F(x)=P(X \le x)$。CDF sampling最简单的抽样方法,该方法需要已知CDF的逆函数。具体的算法步骤是

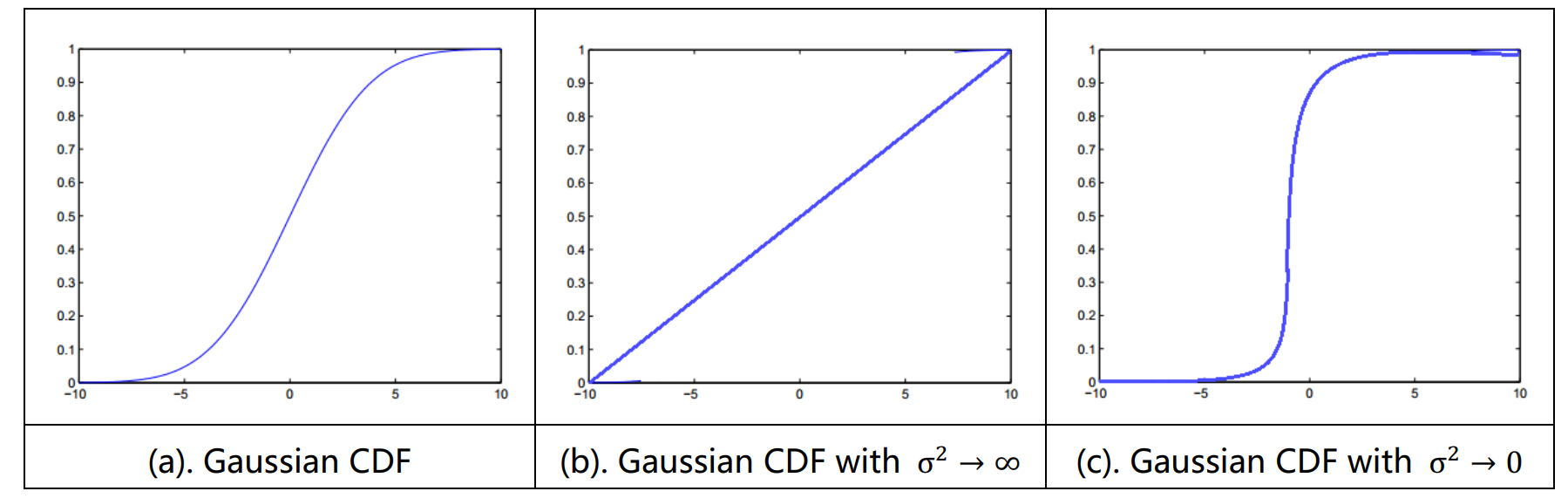
以一维高斯分布为例,其高斯的CDF如下图所示。CDF Sampling首先对$[0,1]$上进行均匀分布采样,将采样值$Y_{0}$带入高斯CDF的逆函数中,求得一个采样值$X_{0}$(即对图中的Y轴进行采样,求得对应的X值)。如下图所示,图(b)中可以看出,当方差很大的时候,高斯分布变得很平坦,每个x被采样到的几率等大; (c)当方差很小的时候,高斯分布绝大部分质量都集中在均值附近,使得采样点也集中与均值处。很明显CDF采样的缺点就是其逆函数的计算十分困难
1.2 Rejection Sampling
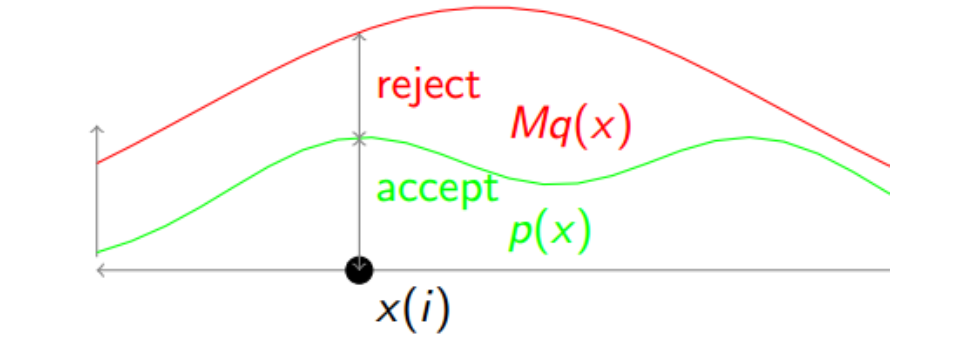
由于待采样分布P(X)的复杂性,拒绝采样旨在利用一个简单的分布$Q(X)$,并构造接受域和拒绝域,然后对简单分布$Q(X)$进行采样(这样的Q分布叫做Proposal Distribution),并且将落在接受域中的采样数据视为对原始分布$P(X)$的采样数据。当然这样的$Q(X)$需要满足一定的条件:要求$Q(X)$在任何处的值都要大于$P(X)$,由此一来才可以定义接受域($P(X)$下的面积)和拒绝域($Q(X)$以下,$P(X)$以上的面积)。 然而,这个条件显然是不可能的成立的,由于两者的积分面积都等于1,所以不可能$Q(X)$在任何处的值都要大于$P(X)$。因此为了保证这个条件,通常会利用一个比较大的数$M$与$Q(X)$相乘,对Q(X)进行放大处理,如下图所示:
所以拒绝采样的步骤是:
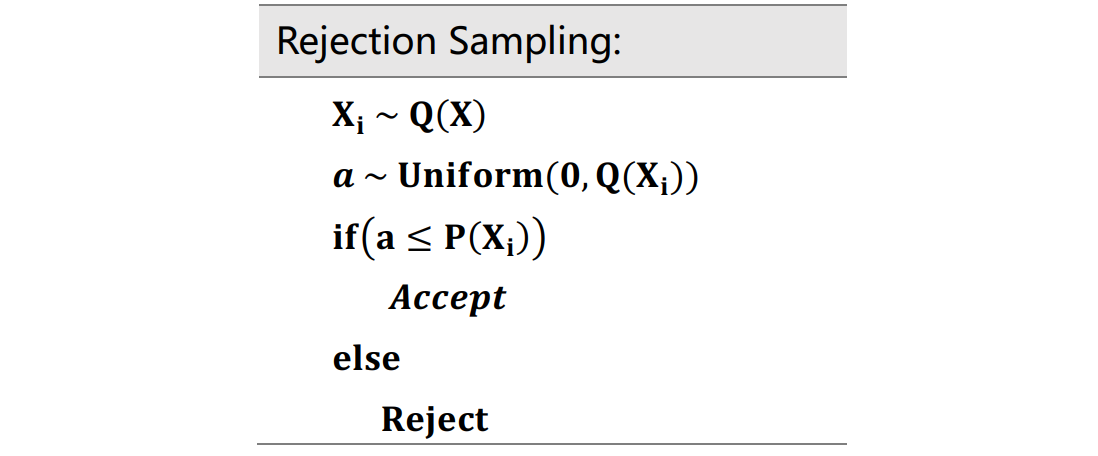
具体来说,先根据$Q(X)$进行采样一个$X_{i}$,然后再从$Q(X_{i})$到X坐标轴的这条竖线上进行均匀采样,如果采样点a落在reject区域就不要这个值,落在accept区域就接受$X_{i}$。明显当两个分布$Q(X)$和$P(X)$比较接近的时候,采样值被拒绝的几率小,相反如果两者差距大,则拒绝的几率就大。所以还是比较合理的。问题是M的放大倍数和$Q(X)$的选择不好确定,导致可能大多数都被reject了,所以采样的效率不好,大多会原地踏步,由此有了Adaptive Rejection Sampling。
1.3 Adaptive Rejection Sampling
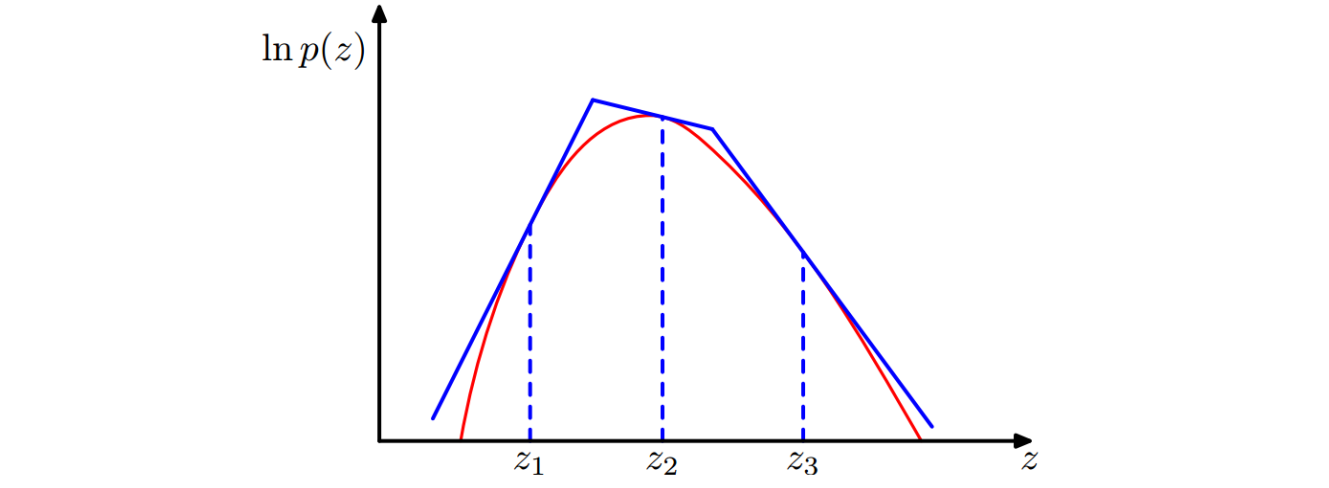
该方法旨在解决$Q(X)$的选取问题,加快Rejection Sampling的抽样速度。它通过$P(X)$来直接构造$Q(X)$,比如,如果$P(X)$是log-concave的($logP(X)$是concave的,比如高斯不是concave的,但是$log(高斯)$是concave的),我们可以通过在$logP(X)$上进行找点做切线来构造一个由多个线性函数组成的分段函数$Q(X)$,如下图所示
但是以上的采样方法,都将面临一个维度问题,在高维度的情况下,这种采样方式是特别困难的。以PRML中的例子来说明,考虑$P(X)$服从零均值,协方差为$\sigma^2 I$的D维高斯分布, 其中$I$是单位矩阵。根据拒绝采样方法,很自然的选择$Q(X)$也是1个零均值的高斯分布,协方差为$\sigma_{q}^2 I$, 很明显,为了得$MQ(X)\ge P(X)$的M值存在,我们必须有$\sigma_{q}^2 I \ge \sigma^2 I$。在D维的情形中, $M$的值为$(\frac{\sigma_{q}^2}{\sigma^2} )^D$,因此接受率随着维度的增大而指数地减小
1.4 Importance Sampling
重要性采样提供了直接近似期望的框架方法,它假定直接从$P(X)$中采样方法完成,但是对于任意给定的$X$值,我们可以很容易地计算$P(X)$。如此为了计算其期望$E(f(X))=\int f(X) P(X) dX$,我们希望对$P(X)$值大(质量大)的区域中尽可能多的进行采样,因为这部分的样本对期望的计算发挥的作用更大。重要性采样,把容易被采样的新的分布$Q(X)$作为目标采样分布,并且赋予这些采样的样本一定的权重,整个样本上的不同大小的权重值的则构成了真实的$P(X)$的采样数据,如下所示
\[E(f(X))=\int f(X) P(X) dX \mbox{ //这里的}X_i \sim P(X) \\ =\int f(X) \frac{P(X)}{Q(X)}Q(X) dX \mbox{ //这里的}X_i \sim Q(X) \\ =\int f_{new}(X) P(X) dX \\ \approx \frac{1}{N}\sum_{i=1}^N f(X_i) \frac{P(X_i)}{Q(X_i)} = \frac{1}{N}\sum_{i=1}^N f(X_i) P_{new}(X_i)\]其中$Wi=\frac{P(X_{i})}{Q(X_{i})}$ 称为重要性权重(importance weights),从而,我们能从简单的分布$Q(X)$中进行采样,通过对于样本权重的控制,还原目标分布$P(X)$的信息。需要指出,重要性采样IS和拒绝采样RS是有区别和联系的:
- RS 每个数据的权重是相同的,通过拒绝部分样本(概率低的样本)来force采样数据服从$P(X)$
- IS 每个数据的权重是不同的,是通过weight的大小来刻画分布,所以的样本都被保留下来
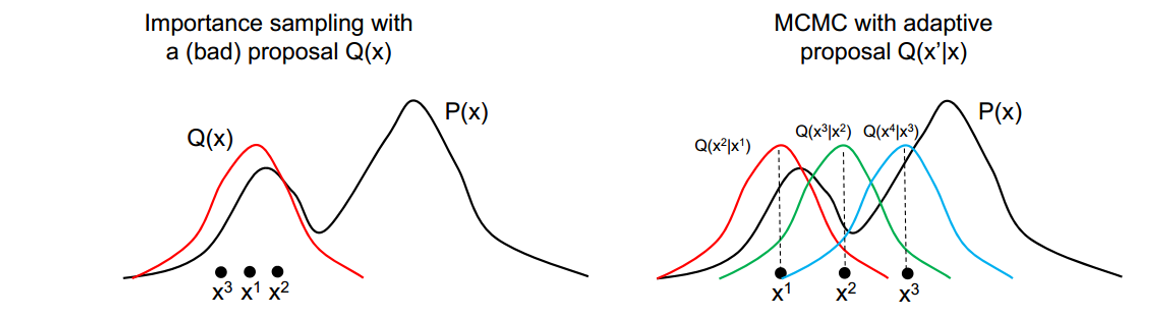
- 两者,两次采样样本之间是没有任何关系的,是独立的进行每次的采样。同时,两者如何选取$Q(X)$是至关重要的,对于IS来说,如果$Q(X)$与$P(X)$之间的相交面积很小很小,如下
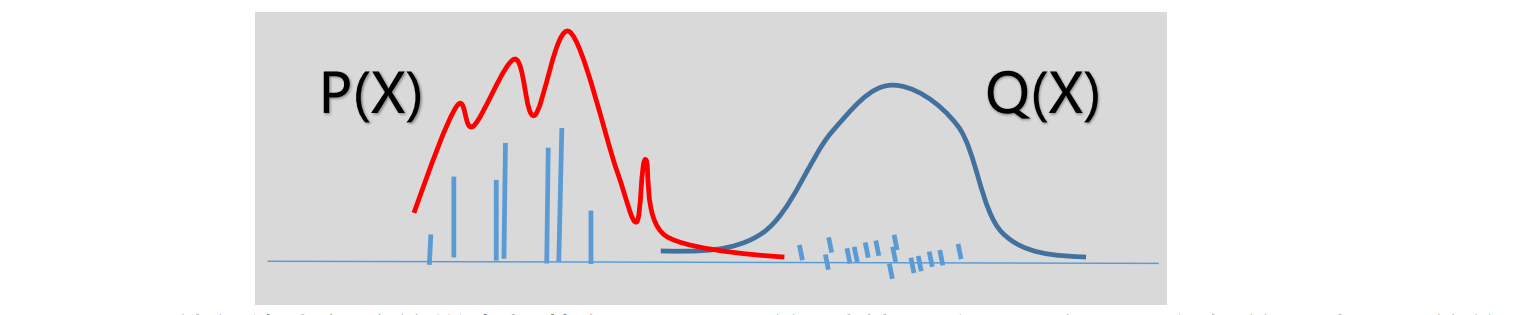
使得绝大部分的样本都落在$Q(X)$下,并且其权重很小,如果要很好的反映$P(X)$的信息,需要进行多次的IS采样(因为小概率落在$P(X)$下的权重很大),其效率决定于PQ的相似度。当然,为了避免这种情况,往往倾向于选择具有长尾特定的Q分布,也可以使用Weighted Resampling(或者叫Sampling-Importance-Sampling),这个方法在后文会介绍。下面再介绍几个重要性采样的变种
1.4.1 Normalization Importance Sampling
从上面我们已经看出,普通IS的假设是:已知$X=x$,我们可以容易的计算出$P(X=x)$,但是在实际情况下,这有可能是不成立的,比如在有向图模型中计算$P(X\mid e)=P(X,e) / P(e)$,其中e代表evidence;再比如MRF中计算$P(X)=P’(X) / Z$,其中Z是partition function。因此我们引入Normalized Importance Sampling,用来应对这种情况:我们不能直接计算出$P(X)$,只能得到$P’(X)=\alpha P(X)$。此时,我们有
\[E(f(X))=\int f(X) P(X) dX \mbox{ //这里的}X_i \sim P(X) \\ =\int f(X) \frac{P(X)}{Q(X)}Q(X) dX = \frac{1}{\alpha} \int f(X) \frac{P'(X)}{Q(X)}Q(X) dX\]令 $r(X)=\frac{P’(X)}{Q(X)}$,有下式成立:
\[\int r(X)Q(X)dX = \int \frac{P'(X)}{Q(X)} Q(X) dX = \int \alpha P(X) dX = \alpha\]所以有:
\[E(f(X))=\frac{1}{\alpha} \int f(X) \frac{P'(X)}{Q(X)}Q(X)dX\\ =\frac{\int f(X)r(X)Q(X)dX}{\int r(X)Q(X)dX} \approx \frac{\sum_{i=1}^m f(X_i)r(X_i)}{\sum_{k=1}^mr(X_k)} \mbox{ //X采样自Q}\\ =\sum_{i=1}^m f(X_i) \frac{r(X_i)}{\sum_{k=1}^m r(X_k)}\]Normalized版本和un-normalized的区别是:
- un-normalized importance sampling的估计量是无偏的($E_{Q}(f_{new}(X))=E_{P}(f(X))$),另一个不是
- normalized importance sampling的方差,在实际使用中会更小。
1.4.2 Likelihood Weighting Sampling
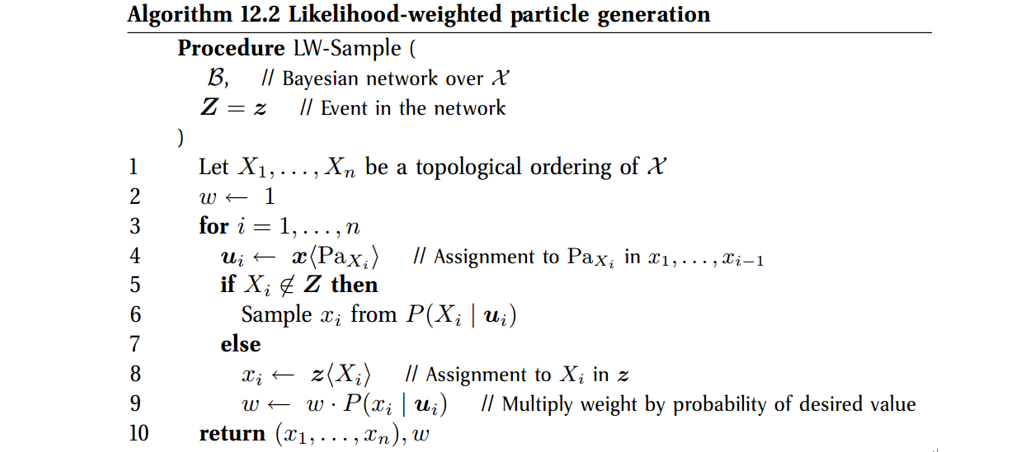
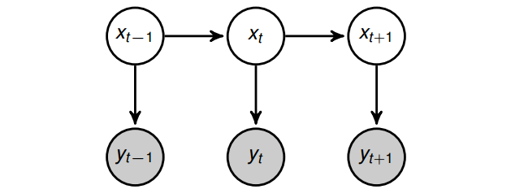
这种采样算法是Normalized IS在有向图模型上的一个特例。如下左图,我们令Χ为网络中的所有节点,以$E \subset Χ$表示已观察到的变量集合。为了对$(x_{1},x_{2}, …, x_{[X]} )^M$ 进行采样(其中,$[X]$表示数据维度,$M$表示采样数据的个数),对于$E$中的变量$X_{i} \in E$,他的采样值就等于他的观察取值,$X_{i}=x_{i}$,对于不在$E$中的变量,我们对$P(X_{i} \mid Pa(X_{i}))$进行采样,其中$Pa(X_{i})$表示$X_{i}$的父节点。其步骤如下所示
举个栗子,现已知$E={G=g^2,I=i^1}$,我们可以计算出$P(D,S,L,G=g^2,I=i^1 )$,但是出于某些神秘的原因我们不能直接得到$P(G=g^2,I=i^1 )$,我们还想求的$P(D,S,L\mid G=g^2, I=i^1)$。那么现在,我们采用Normalized Importance Sampling进行采样,首先$Q$的选择是个大问题,但是我们已知了$E={G=g^2,I=i^1 }$,去掉指向节点$G$, $I$的边,可以得到右图,其表达出的分布就是我们所需的$Q$,
\[Q(D,S,L)=P(D)P(S\mid I=i^1) P(L \mid G=g^2)\]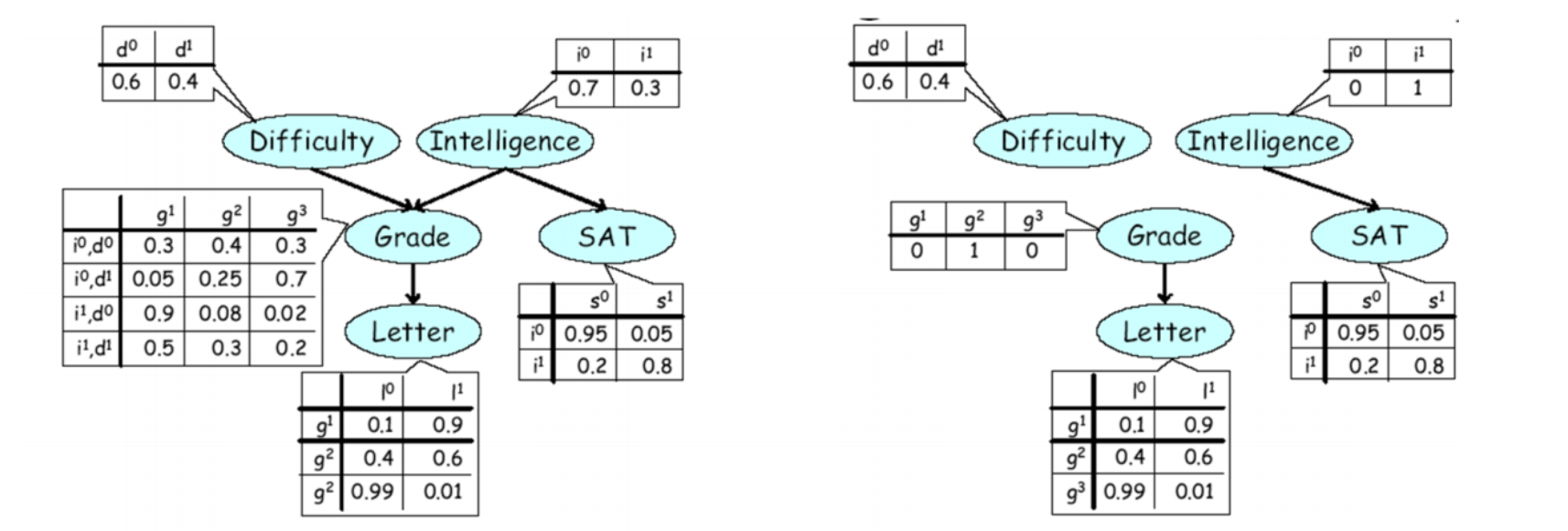
这样得到的$Q$将产生更多的独立性关系,简化$Q$联合概率表示,去除其父节点的连边,相当于改变$E$中的节点的概率取值,即已知$G=g^2,I=i^1$,则$P(G=g^2 )=P(I=i^1 )=1$ (但是这不是说,原始的概率取值也跟着改变,这里只是给一个图形化的解释而已)。那么现在对$Q$进行采样,就只用分别的采样三部分
\[d \sim P(D) \\ s \sim P(S \mid I=i^1) \\ I \sim P(L \mid G=g^2)\]在得到采样点之后,还需确定点的权重。此时,权重仅仅由E中的节点在给定它的父节点下的概率的乘积确定:
\[r(X)=\frac{P'(X)}{Q(X)}=\frac{P(D,S,L,G=g^2,I=i^1)}{P(D)P(S \mid I=i^1)P(L \mid G=g^2)} \\ =\frac{P(D)P(I=i^1)P(G=g^2 \mid D, I) P(S \mid I=i^1) P(L \mid G=g^2)}{P(D)P(S \mid I=i^1)P(L \mid G=g^2)} \\ =P(I=i^1) P(G=g^2 \mid D, I)\]值得注意的是,likelihood weighting算法是先带权采样,最后才进行权重的归一化操作。说起来还是太抽象,下面我们做几轮采样的实际例子:
初始化权重$w = 1$,$E={G=g^2,I=i^1}$
- 采样$D$,$D$不在$E$中,进行采样,若得到$D=D^0$;
- 采样$I$,$I$在E中,直接取值$I=i^1$,更新权值$w = wP(I=i^1)=1.00.3=0.3$;
- 采样$G$,G在E中,直接取值$G=g^2$,更新权重$w = wP(G=g^2 )=0.30.08=0.024$
- 采样$L$,若$L=l^1$
- 采样$S$,若$S=S^0$ ,然后我们得到下面的表格

初始化权重$w = 1$,$E={D=D^1,I=i^0}$
- 采样$D$,$D$在$E$中,直接取值$D=D^1$,更新权重$w = w*P(D=D^1 )=0.4$
- 采样$I$,$I$在$E$中,直接取值$I=i^0$,更新权值$w = wP(I=i^0 )=0.40.7=0.28$;
- 采样$G$,若$G=g^0$
- 采样$L$,若$L=l^1$
- 采样$S$,若$S=S^0$,然后我们得到下面的表格
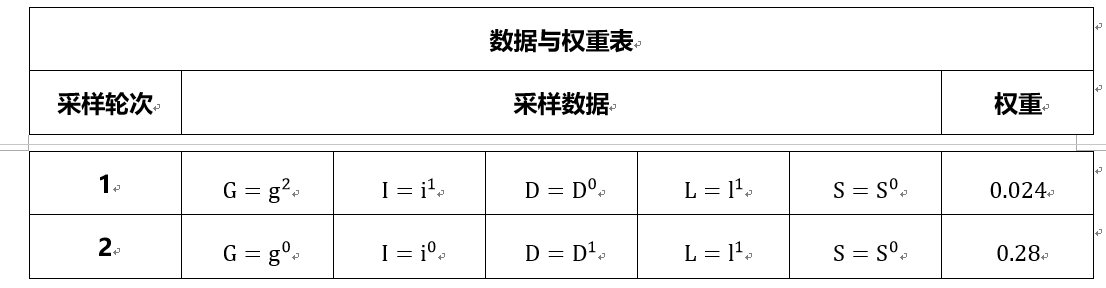
就这样依次的不断采样,得到最后的样本集合。好了,由于我们比较懒,现有的样本就只有上面两个,那么我们就可以求概率啦,比如边缘概率
\[P(D=D^1) = \frac{0.28}{0.28+0.024} = 0.92105\]恩恩,跟图中的真实值差很远,毕竟我们只有两个样本嘛。最后总结一下,可以发现,如果E中的节点全是根节点,那么所有样本的权重都会是一样的;另一方面,如果E中的节点都是叶子节点,如果观测值发生的几率小,那么样本的权值也很有可能会很小(因为此时,权值只与观测节点有关,也就是E中的节点有关,并且他们在Q中没有父节点,使得他们可以看做是先验。)
1.4.3 Weighted Resampling (Sampling-Importance Sampling)
1.4.4 Sequential Importance Sampling
因为Importance Sampling在高维度上表现不好,比如如果$P(X)$是一维零均值高斯,并且要求采样值$x$必须大于0,那么采出来一半的数据都不能用,如果$x$的维度增加的话,比如20维,那么平均采集$2^20$次才有一个样本有效。为了解决这个问题,引入Sequential Importance Sampling(或者Particle Filtering,动态系统中的一种),旨在对每个样本一维一维的进行采样,在这个过程中$Q$分布也跟着慢慢的变化。既然它又叫做Particle Filtering,那么先说说什么是Filtering操作:给定$T = 1$到$t$时间的观测值,我们希望对时间$T=t$时的状态进行求解,目标为$P(X_{t} \mid Y_{1},Y_{2},…,Y_{t})$。下面,给定图模型,对filtering的求解进行推导。
根据有向图上的独立性关系(给定$X_{t},Y_{t}$与其他节点条件独立),对上式进行化解
\[P(X_t \mid Y_1, Y_2, ... , Y_t) \propto P(X_t, Y_1, Y_2, ... , Y_t) =P(Y_t \mid X_t) P(X_t \mid Y_1, Y_2, ..., Y_{t-1})\]其中,$P(Y_{t} \mid X_{t})$在HMM或者动态系统中称为Measurement Probability,而另一项$P(X_{t} \mid Y_{1},Y_{2},…,Y_{(t-1)})$表示,给定一组观察,对下一个时刻状态的Prediction。现在我们回到正题,假设现在我们选好了$Q$分布,我们希望从中开始采样,由于$X$的维数太高,我们首先对第一维进行采样(注$X_{(1:M)}$中的$1:M$表示第一维到第M维)。已知目标为$X_{1}$,通过把$X$的第$2:M$维积分积掉就可以得到,即下式,此时的权值为$r(X_{1})$
\[P(X_1) = \int P(X_{(1:M)}) dX_{(2:M)} \\ r(X_1) = \frac{P(X_1)}{Q(X_1)} \mbox{ }\mbox{ }\mbox{ }\mbox{ } X_1 \sim Q\]在获取了$X_{1}$之后,考虑$X_{2}$,也通过积分的形式得到$X_{(1:2)}$,那么只用根据$Q(X_{2} \mid X_{1})$对$X_2$采样我们就可以获得$X_{(1:2)}$
\[P(X_{1:2}) = \int P(X_{(1:M)}) dX_{(3:M)} \\ r(X_{1:2}) = \frac{P(X_{1:2})}{Q(X_{1:2})} =\frac{P(X_{1:2})}{Q(X_1)Q(X_2 \mid Q_1)} \mbox{ }\mbox{ }\mbox{ }\mbox{ } X_{1:2} \sim Q\]这个过程中,在采x的第二维的时候,只用从Q的条件概率里进行采样就行了,以此类推。并且,我们还可以用上一次的信息来sequencial的更新权重
\[r(X_{1:t-1})=\frac{P(X_{1:t-1})}{Q(X_{1:t-1})} \rightarrow Q(X_{1:t-1}) = \frac{P(X_{1:t-1})}{r(X_{1:t-1})} \\ r(X_{1:t}) = \frac{P(X_{1:t})}{Q(X_{1:t-1})Q(X_{t}\mid X_{1:t-1})} = r(X_{1:t-1}) \frac{P(X_{1:t})}{Q(X_t\mid X_{1:t-1})P(X_{1:t-1})}\]2. 不独立数据采样
(这类别是我瞎编的)不独立数据采样顾名思义就是前后两次采样点之间是不独立获取的,其实前文说到的Sequential Importance Sampling也应该算是不独立采样的类型,两次采样点之间通过权值相依赖,采样数据通过条件概率获取,我还是把它作为IS的扩展放在上面了。
2.1 Monte-Carlo (MCMC)
不同于以上的采样方式,MC方法虽然也会动态的构造一个proposal distribution $Q$,但是所采样的数据仍然是来自于原始分布P,而不是Q
在图模型上的采样几乎都是用MC方法,因为MC直接对P分布进行采样,当P分布很难算的时候,正好可以做inference来解决,所以MC和图模型简直是天生一对?但是虽然MC方法可以应对高维问题,但是在高维情况下的一些小概率事件很难被采样到,而且,对于像MRF一样的分布(自带一个partition function Z)是不适用的,除非我们知道了这个Z。下面简要说明所有的MC方法的理论基础,具体分析就不说明了
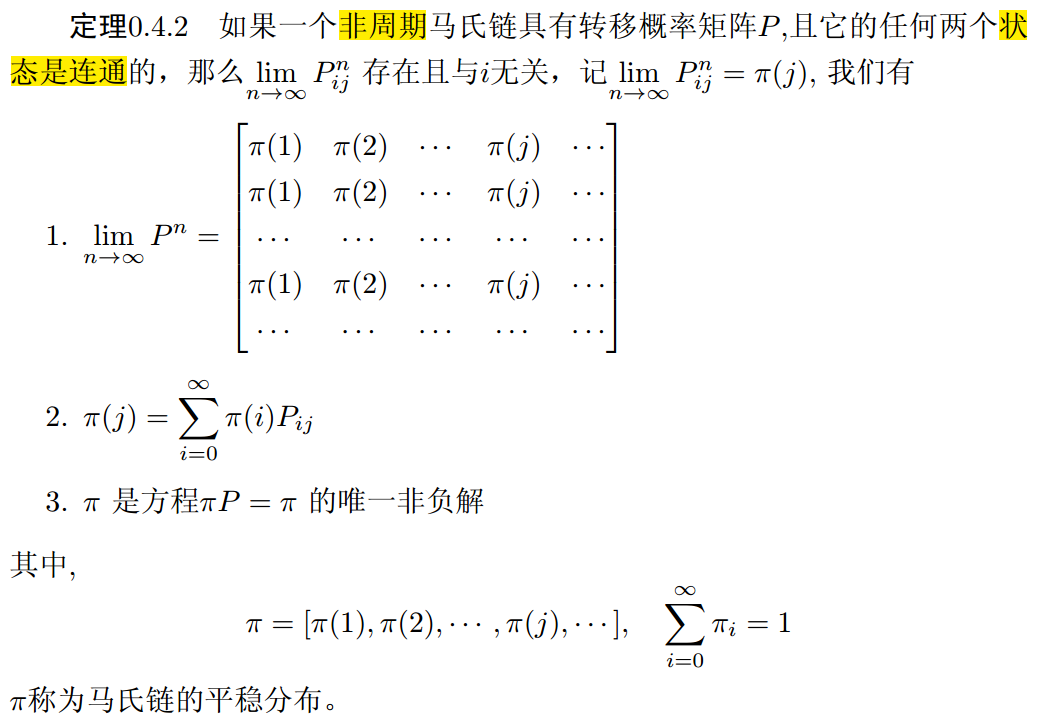
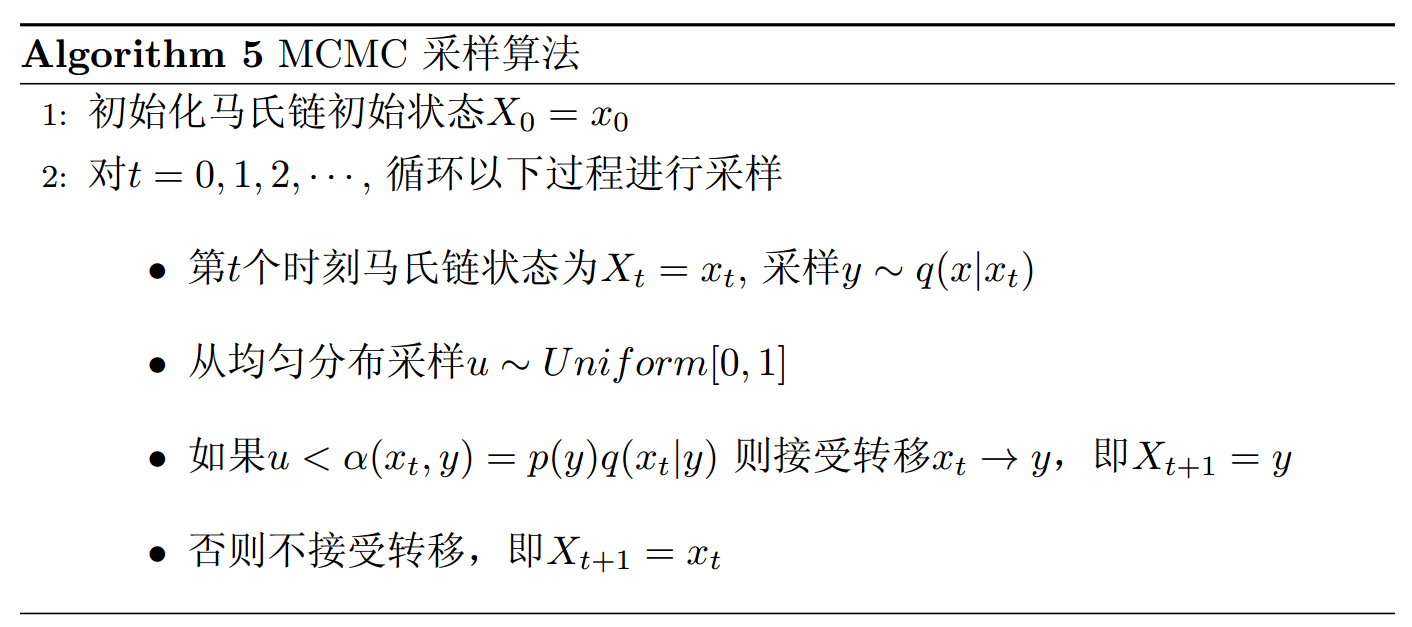
通过使用马氏链的收敛与平稳分布,在给定的概率分布$P(X)$下,我们如果能构造一个转移矩阵为$P$的马氏链,使得该马氏链的平稳分布正好是分布$P(X)$,那么我们从任意一个初始状态,沿着这条马氏链转移,得到一个转移序列$X_{0},X_{1},…,X_{n},X_{(n+1)},…$ ,如果马氏链在第$n$步收敛,那么目标$P$的采样就是$X_{(n+1)},X_{(n+2)},…$,而$n$之前的采样叫做burn in,这就是MCMC采样的重要思想!但是这里很重要的一个问题就是,$n$值得确定,这一般都是人为,凭经验的。那如何去构造这样的转移矩阵$P$使得平稳分布就是我的目标分布呢?我们是用细致平稳条件来构造
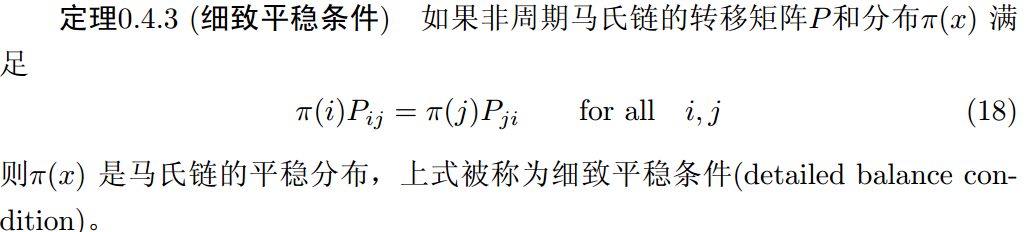
其中,$P_{ij}$表示从状态$i$转移到状态$j$,$\pi (i)$表示处于$i$状态的概率。这个定理表示,状态$i$与状态$j$之间的相互转移是能量守恒的,所以是平稳的,具体的数学证明就从略咯。下面具体介绍两种MCMC采样的算法,MH和Gibbs采样。
2.2 MH Sampling
现已知目标分布为$P(X)$,我们构造转移矩阵$Q(X)$,让他满足细致平稳条件:
\[P(X_i)Q(X_j \mid X_i) = P(X_j) Q(X_i \mid X_j)\]当然现实又是残酷的,这样的$Q(X)$还是很难构造的,所以我们需要一个更松弛的条件,接受率$\sigma$,我们希望满足
\[P(X_i)Q(X_j \mid X_i)\sigma(X_j \mid X_i) = P(X_j) Q(X_i \mid X_j)\sigma (X_i \mid X_j) \\ \mbox{其中:} \left\{\begin{matrix} \sigma(X_i \mid X_j) = P(X_i) Q(X_j\mid X_i) \\ \sigma(X_j \mid X_i) = P(X_j) Q(X_i\mid X_j) \end{matrix}\right.\]这样就恒等啦。也就是说,如果令$Q’(X_{j}\mid X_{i})=Q(X_{j}\mid X_{i})\sigma (X_{j}\mid X_{i})$,从此马氏链$Q’$的平稳分布就是目标$P(X)$了,当状态$i$以概率$Q(X_{j}\mid X_{i} )$转移到状态j时,我们以$\sigma(X_{j} \mid X_{i})$的接受率接受这个跳转。所以按照这个思路,算法执行过程为
但是这样的问题是,接受率$\sigma$,可能会比较小,从而导致大部分的样本都被拒绝,使得采样进展和收敛的进度都很慢很慢,比如
\[P(X_i)Q(X_j \mid X_i)*0.1 = P(X_j) Q(X_i \mid X_j)*0.2\]改进的方法很直观,我们直接对等式做放大处理,使得两者中最大的那个数,放大到1,比如这里可以同时乘以5,那么得到
\[P(X_i)Q(X_j \mid X_i)*0.5 = P(X_j) Q(X_i \mid X_j)*1.0\]那么要从状态$i$到状态$j$,需要接受率至少为$\sigma=min{\frac{P(X_{j} )Q(X_{i}\mid X_{j} )}{P(X_{i})Q(X_{j}\mid X_{i})}, 1}=0.5$,需要注意的是,这样做我们并没有破坏平稳条件:
\[P(X_i)Q(X_j \mid X_i)\sigma(X_j \mid X_i) =P(X_i)Q(X_j \mid X_i)min\{\frac{P(X_{j} )Q(X_{i}\mid X_{j} )}{P(X_{i})Q(X_{j}\mid X_{i})}, 1\}\\ =min\{ P(X_j)Q(X_I \mid X_j), P(X_i)Q(X_j\mid X_i) \}\\ =P(X_j) Q(X_i \mid X_j) min\{1, \frac{P(X_{i} )Q(X_{j}\mid X_{i} )}{P(X_{j})Q(X_{i}\mid X_{j})} \} \\ = P(X_j) Q(X_i \mid X_j)\sigma (X_i \mid X_j)\]到这里,MH算法终于浮出了水面,如下所示
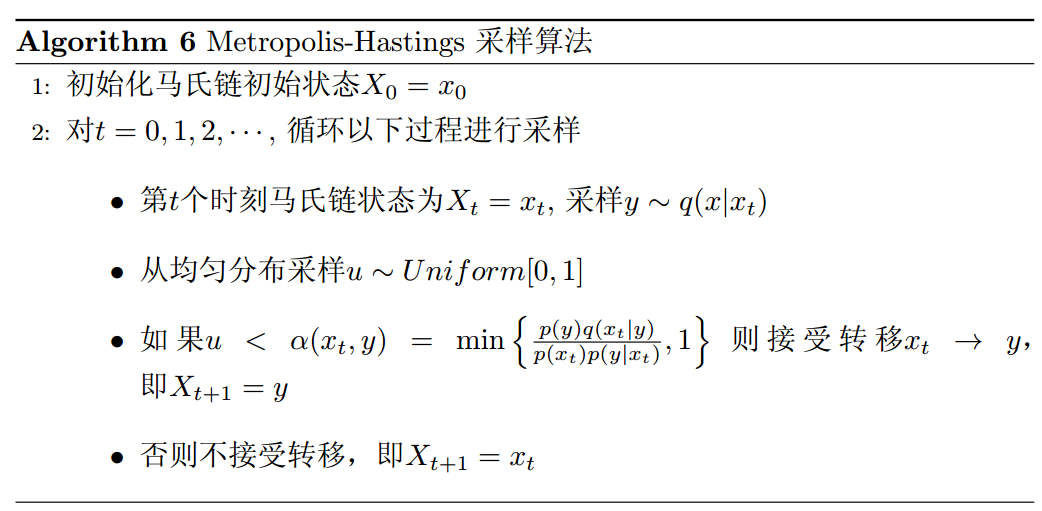
下面我们来看一个MH采样的例子
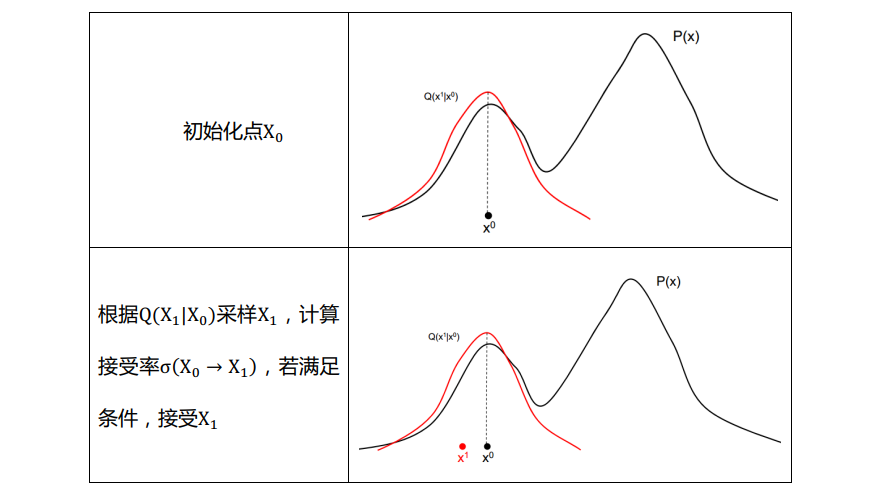
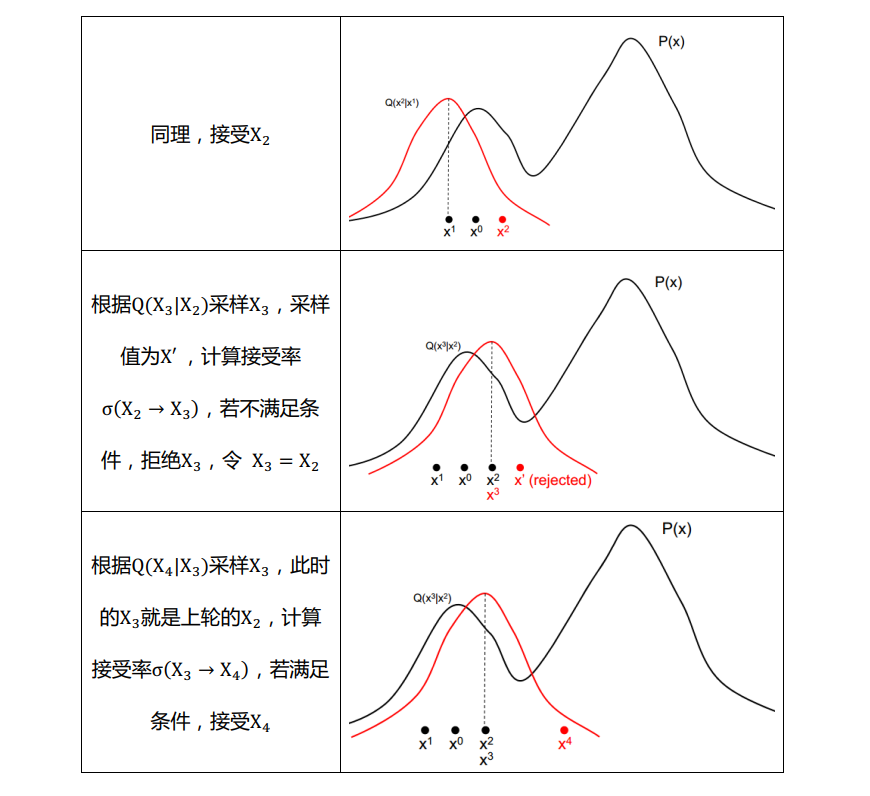
接下来,说说MH的缺点:其实从例子里可以看出,如果proposal distribution $Q(X)$和$P(X)$的关联性很差的话,会很影响采样的收敛速度,比如讲例子中的$Q$的方差减小,虽然接受率会提高,但是遍历整个空间的将变得很慢,另一方面,若增大$Q$的方差,那么样本被拒绝的概率明显会增加。其中,Hybrid Metropolis Hasting是一种解决办法,他的一个关键思想是考虑了采样的方向与步长,该算法对P(X)的对数求导
\[\frac{\partial log P(X) }{\partial X} = \frac{P'(X)}{P(X)}\]其中,$P(x)$控制采样步长,$P’(x)$控制方向,导数的方向总是向着$P(x)$上升的方向,所以是向着分布的峰值处采样,并且此时对应的采样的步长$1/P(x)$ 小,此处的采样样本数目很多。
2.3 Gibbs Sampling
Gibbs采样是对MH算法中接受率的改进,因为毕竟MH的接受率不是1,Gibbs采样旨在找一个转移矩阵,每次的使得接受率恒为1,所以Gibbs采样可以看做是MH算法的一个具体情况。总的来说,Gibbs采样是基于坐标轴的采样方法。我们考虑二维的例子。给定一个概率分布$P(X,Y)$,考虑横坐标相同的两个点$A(X_{1},Y_{1})$, $B(X_{1},Y_{2})$。
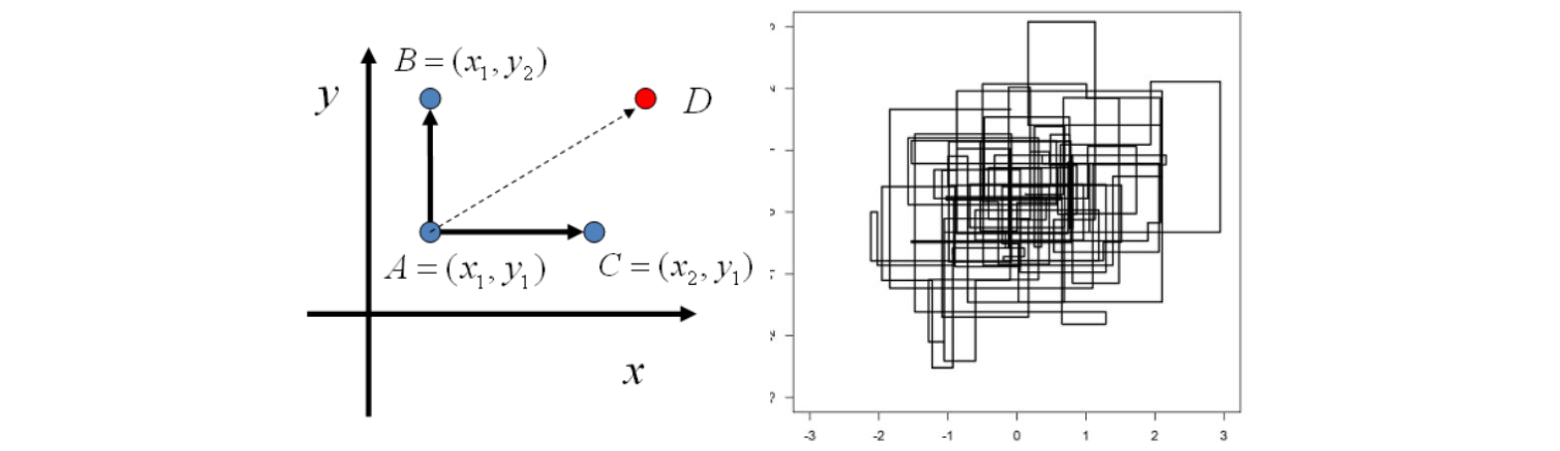
那么有
\[P(X_1, Y_1) P(Y_2 \mid X_1) = P(X_1, Y_2)P(Y_1 \mid X_1)\]这个式子说明,沿着坐标轴方向上,任意两点之间的转移都满足细致平稳条件。所以在二维或者高维情况下的Gibbs采样算法很简单,如下所示,当然对于Gibbs采样也是有burn in阶段的
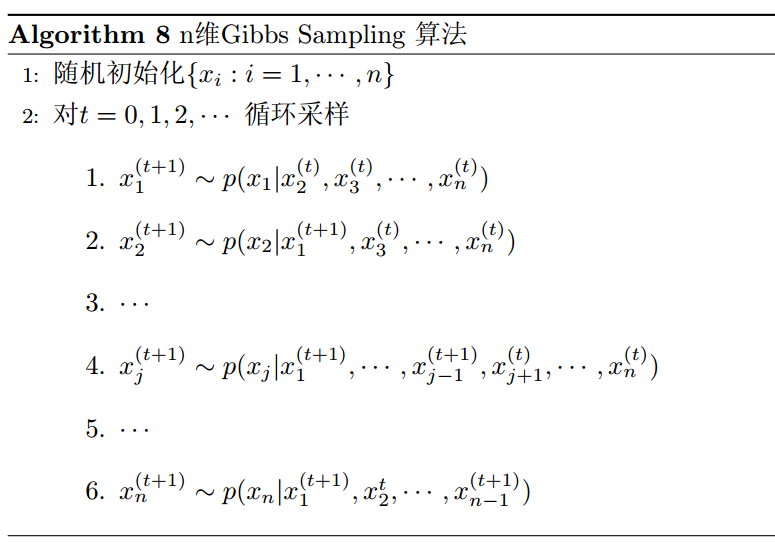
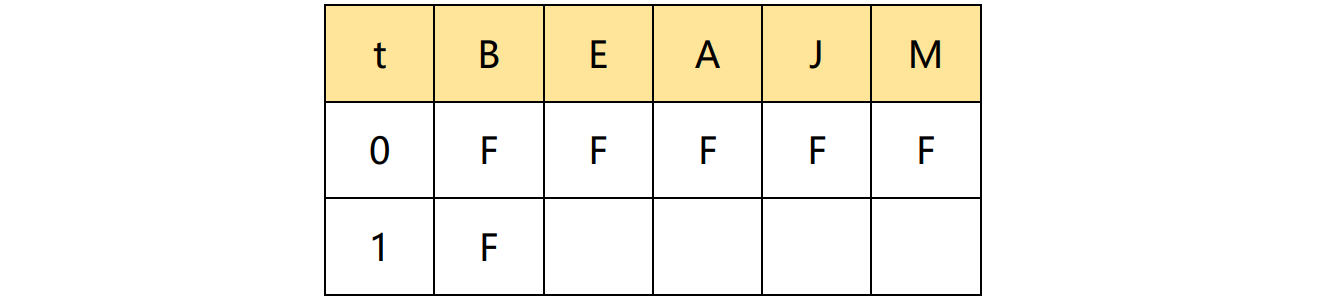
从算法中可以看到,采样信息是立即就使用的,在$X_{1}^{t+1}$ 会在对$X_{2}^{t+1}$采用时被使用到。下面举一个例子进行说明。给定下图的贝叶斯网络,节点都是二值得(T, F),我们要对其变量进行Gibbs采样,假定在t=0时刻,所有变量取值为F,并且我们的采样顺序固定为B, E, A, J, M
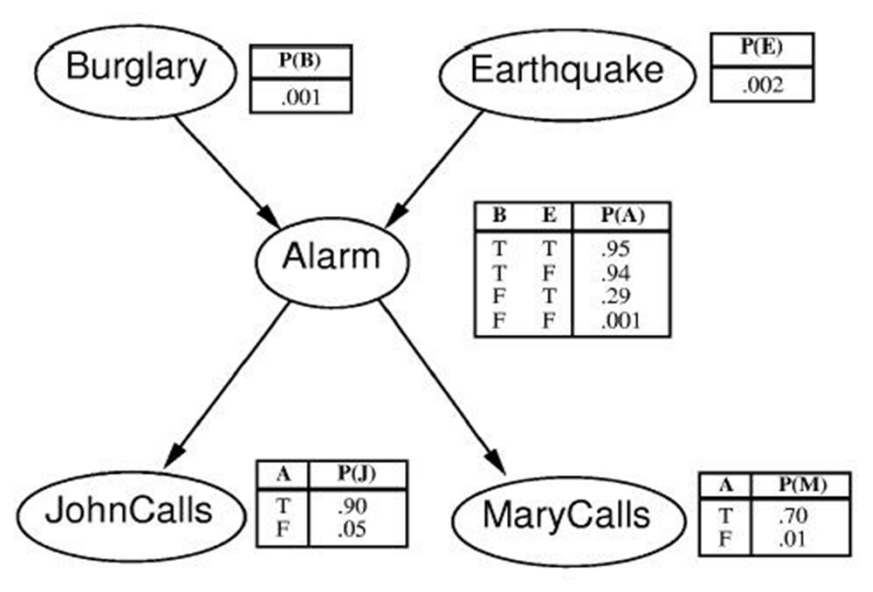
现在给定其他变量,我们对B进行采样,对上图B在给定A的条件下,与E节点是相互依赖的,所以存在
\[P(B \mid E,A,J,M)=P(B \mid A,E) = \frac{P(B,A,E)}{P(A,E)} = \frac{P(B)P(E)P(A \mid E, B)}{P(A,E)} \propto P(B) P(A \mid E, B)\\ P(B=F \mid A=F, E=F) \propto P(B=F) P(A=F \mid E=F, B=F) = 0.999 * 0.999 \\ > P(B=T \mid A=F, E=F)=0.001 * 0.06\]假设根据上式,我们以概率采样得B=F,我们便可以更新下表
同理,我们采样 E 节点
\[P(E \mid B,A,J,M)=P(E\mid A,B) \propto P(E)P(A\mid E,B) \\ P(E=F \mid A=F,B=F)=0.998 * 0.999\]假设,虽然E=F的概率很大,但是我们的采样值是F=T,然后更新表格
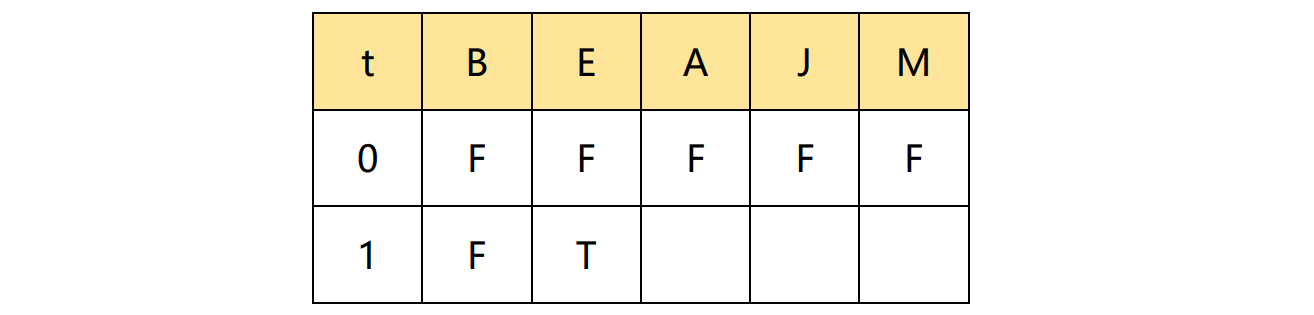
最终这么一直采样下去,就可得到最后的采样样本
2.4 Slice Sampling
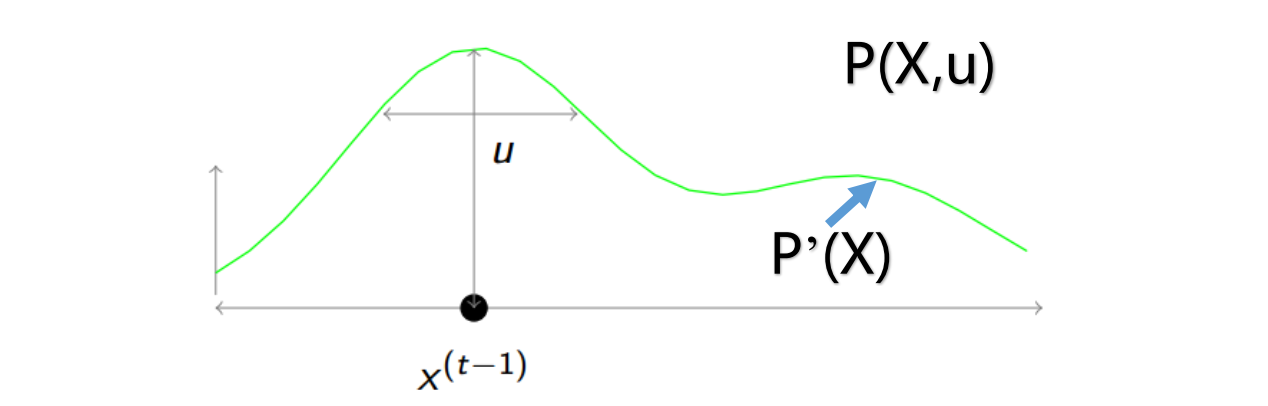
之前有一点点的提到,对于MH(包括Gibbs)的缺点就在于采样步长的敏感性,其步长是由转移条件概率的方差确定的,如果方差太小,接受率高,但是收敛执行很慢;方差大,则拒绝率高。Slice Sampling则旨在自适应的调节步长来匹配分布特性,它的假定和NIS一致,认为不能直接计算出$P(X)$,只能得到一个非归一化的分布$P’(X)=\alpha P(X)$。该算法涉及到引入一个新变量$u$,然后从联合分布$P(X,u)$中进行采样。其联合分布构造如下
\[P(X,u)=\left\{\begin{matrix} \frac{1}{Z} \mbox{ if } 0 \leq u\leq P'(X) \\ 0 \mbox{ otherwise} \end{matrix}\right.\]其中,$Z=\int P’(X) dX=\alpha$,也就是说$P(X)=P’(X)/Z$。这样的联合概率分布满足两个性质,第一,在区间$ 0\leq u\leq P’(X)$中,$P(X,u)$是均匀分布的(因为Z是常数);第二,如下式
\[\int P(X,u) du=\int_0^{P'(X)} \frac{1}{Z} du = \frac{P'(X)}{Z} = P(X)\]所以,Slice Sampling想法就是对联合概率$P(X,u)$进行采样之后,消去$u$之后就是我们目标$P(X)$的采样值。当然,Slice采样并不是这个步骤,而是如下所示:先给定$X^{t-1}$的值,对$P(X,u)$在面积$0\leq u\leq P’(X)$上进行均匀采样$u$,然后再$P’ (X)>u$的区域(就是过点采样点$u$,做垂直于$U$轴的线,把$P’(X)$给切片)的切片上进行均匀采样,得到下一个样本$X^t$。所以Slice Sampling更容易在波峰处进行采样
在上图的例子中,一切都显得这么顺利,当然实际上并不是这样,因为我们对$P’(X)$进行切片的时候,很可能不切到一个波峰,此时对多个波峰进行均匀采样是不适合的,因为他们取值并不连续,如下图所示,存在了两个波峰的切片
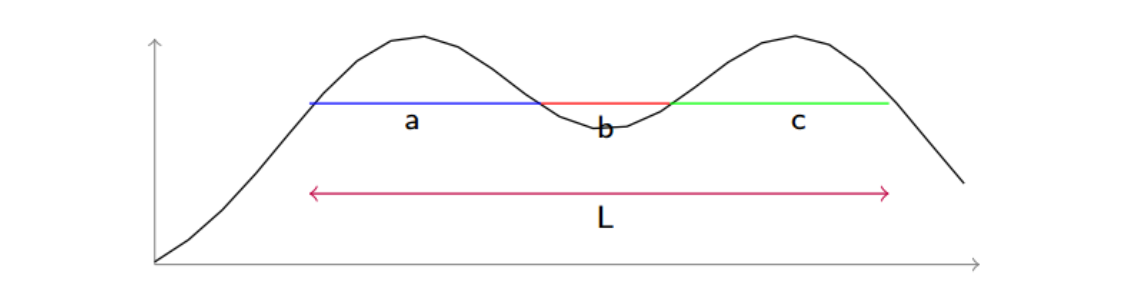
解决这个计算问题引入Shrink algorithm,该算法在各个波峰,通过凹进去的部分,联接起来,组成一个大切片(也就是图中,通过$b$,连接了$ac$,然后$abc$看做一个切片,区间是$[a_start,c_end]$)进行均匀采样。假设$X^{t-1}$在a下方,采样值$X^{t}$位于了$b$上,假设是$b1$,则我们需要做收缩处理,把采样区间变成$[a_start,b1]$,如果落在非b区域,则接受,否则再做一个收缩。
这么做的话,两次最终的采样值更有可能在同一个比较近的距离,意思是如果前一次的采样值落在$a$中,那么下一次的采样值落于$a$中的可能性比落入$c$中的可能性更大,因为如果落在了$b$中,还是可以缩回来到$a$中的。但是需要保证,上一次落在$a$的概率 和下一次落在$a$的概率是相同的,这样才能保证用这种机制所得到的样本的分布才不改变
事实上,这种假设是成立的,我们继续以上图为例子,可以求出如下所示的跳转概率,其中$P(X^{t} \in a \rightarrow X^{t+1} \in a)$表示当前样本在$a$中,下次样本也在$a$中的概率
\[\left\{\begin{matrix} P(X^{t} \in a \rightarrow X^{t+1} \in a) = \frac{a+b}{L} \\ P(X^{t} \in a \rightarrow X^{t+1} \in c) = \frac{c}{L} \\ P(X^{t} \in c \rightarrow X^{t+1} \in a)=\frac{a}{L} \\ P(X^{t} \in c \rightarrow X^{t+1} \in c)=\frac{c+b}{L} \end{matrix}\right.\]那么
\[P(X^{t+1} \in a)=P(X^{t} \in a \rightarrow X^{t+1} \in a)P(X^{t} \in a ) + P(X^{t} \in c \rightarrow X^{t+1} \in a)P(X^{t} \in c ) \\ =\frac{a+b}{L} * \frac{a}{L} + \frac{a}{L}\frac{c}{L}=\frac{a}{L} = P(X^{t} \in a)\]同理也有$P(X^{t+1} \in c)=P(X^{t} \in c)$成立,也就是说$P(X^{t+1})=P(X^{t})$